Terminology and Abbreviations
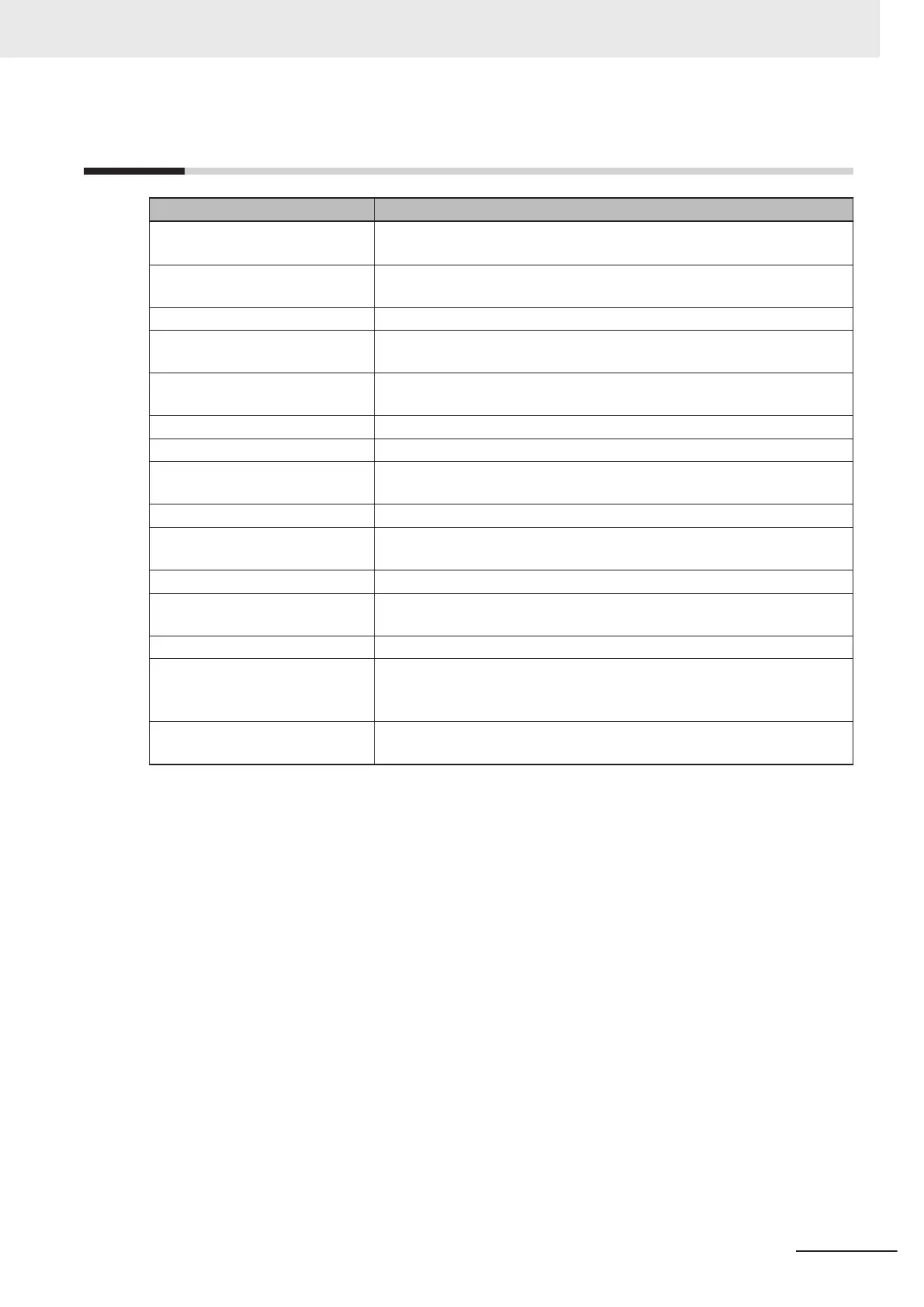
Term / Abbreviation Description
Application Controller Industrial PC that provides additional functionality to the robot to execute
PackManager and Robot Vision Manager applications.
Automatic Mode Operating state of the robot during normal conditions. In this mode, pro-
gram execution will control the robot up to the maximum allowable speed.
Control Power 24 VDC supply that energizes control and other non-servo motor circuits.
End-of-arm Tooling Any device mounted to the robot's tool flange intended for performing work
during robot operation.
Emergency Stop An action or device used to immediately stop the robot. This may be refer-
red to as emergency stop, E-stop, or ESTOP.
Flyover The cable assembly that connects the robot base to the outer link.
Hardstop Physical limit that restricts the range of motion for a robot axis.
High Power 48 VDC supply that energizes all internal servo motors to allow robot mo-
tion.
Joint Mechanical robot component that connects its moving parts.
LED Indicator Multi-colored light on top of the outer link that provides a visual indication of
the robot operating state.
Link Mechanical robot component that moves in a radial motion.
Manual Mode Operating state of the robot during commissioning, position teaching, and
other setup operations.
SCARA Selective Compliance Assembly Robot Arm
T20 Pendant Optional, handheld device used to manually jog the robot, teach locations,
and debug programs without a PC. This is also referred to as a Teach
Pendant or a pendant.
Quill Mechanical robot component that provides motion in the z-axis and rotary
motion for the tool flange. This is a ball-screw mechanism.
Terminology and Abbreviations
25
i4L Robots User's Manual (I658)

 Loading...
Loading...




