4-1
Payload and Speed Considerations
Careful considerations must be made when using high payloads, high accelerations, or a combination
of both.
If non-linear moves such as joint moves or arc moves are required with high speeds or high payloads,
contact your local OMRON representitive for more information about acceleration and payload limita-
tions.
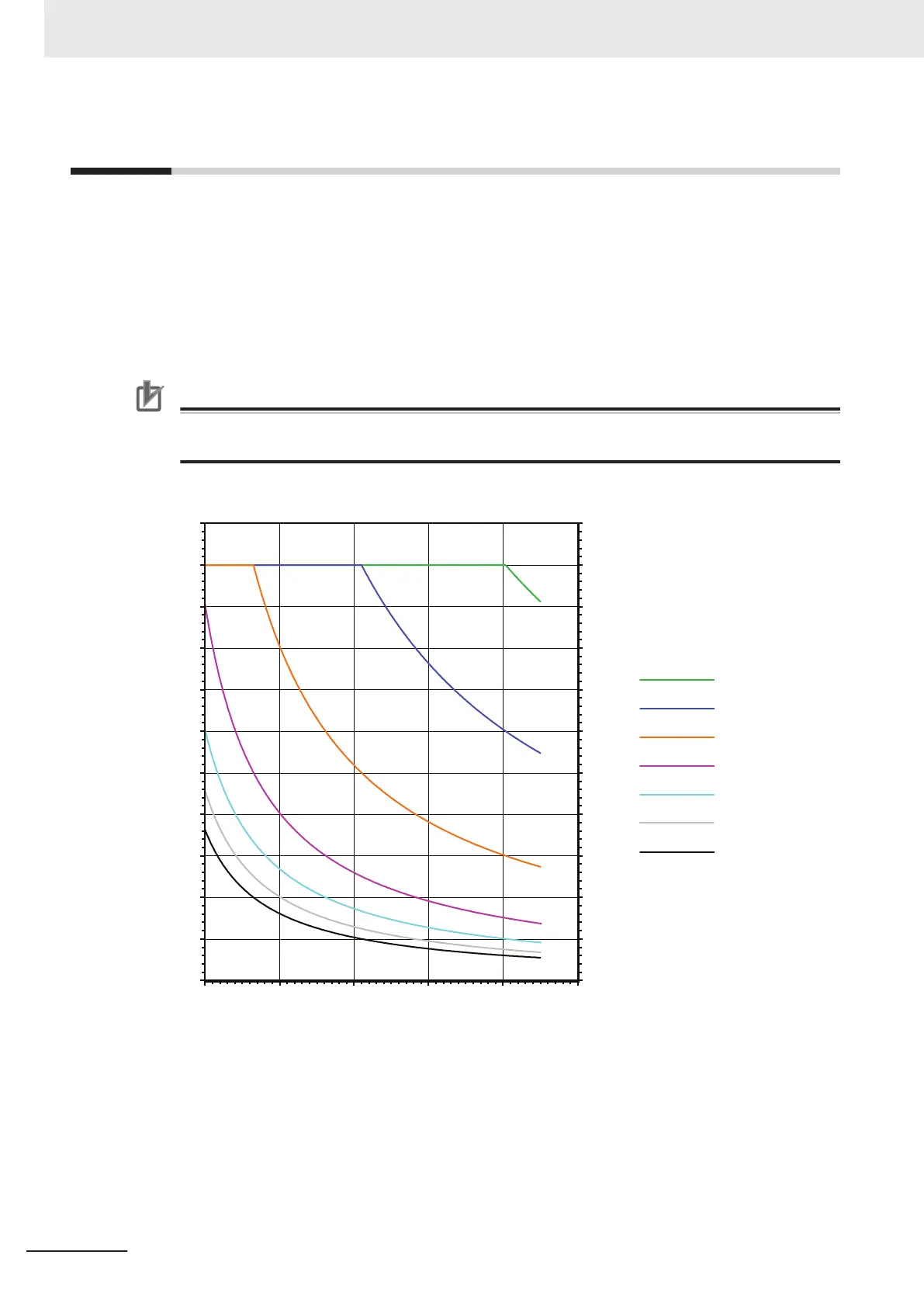
Use the following chart to understand the limitations to acceleration and payload when making linear
moves. Some linear moves are not achievable over all paths in the working envelope.
Precautions for Correct Use
Operating the robot outside of the payload and speed constraints described in this document
can damage or reduce the service life of the z-axis quill.
0
10
20
30
40
50
60
70
80
90
100
110
0
100
200
300
400
500
600
700
800
900
1000
1100
Acceleration (m/s²)
Acceleration (%)
0.3 kg
Payload Z-Location vs. Acceleration at 100% Speed
(Linear Moves Only)
0 100 200 300
400
500
Payload Z-Location (mm) = Joint 3 Position + Payload Center of Gravity
0.5 kg
1.0 kg
2.0 kg
3.0 kg
4.0 kg
5.0 kg
4 Operation
4-2
i4L Robots User's Manual (I658)

 Loading...
Loading...




