5-60
5-16 User Parameters
5
Operating Functions
• Use this parameter to determine speed loop responsiveness.
• The setting for the Speed Loop Gain must be increased to increase the Position Loop Gain and
improve the responsiveness of the entire servo system. Setting the Speed Loop Gain too high,
however, may result in oscillation.
• The setting unit for Pn11 will be Hz if the Inertia Ratio (Pn20) is set correctly.
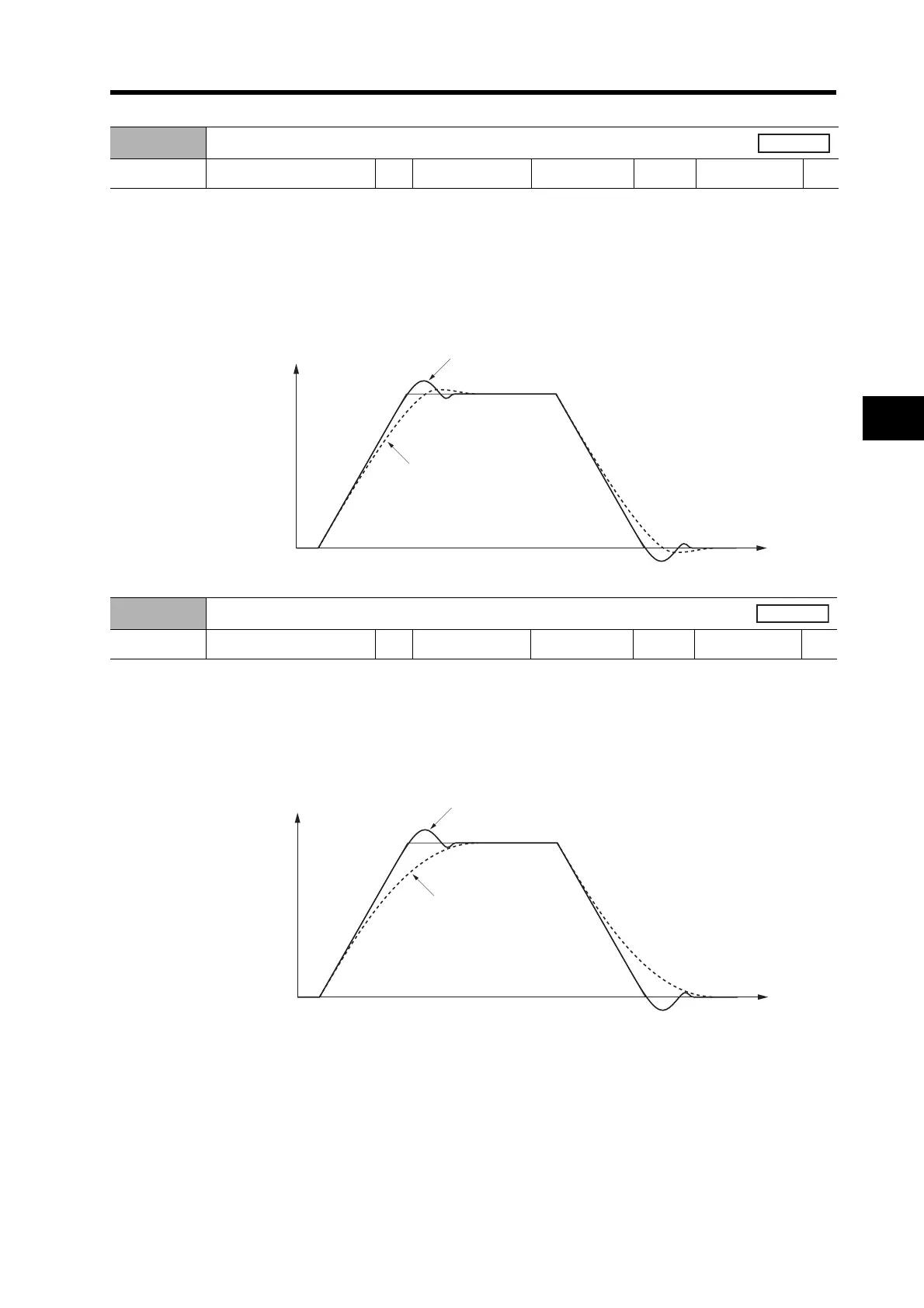
When the speed loop gain is changed, the response is as shown in the following diagram.
• Use this parameter to set the speed loop integration time constant.
• The smaller the setting, the faster the deviation will come close to 0 when stopping. If 1000 is set,
the integral will be ineffective.
When the speed loop integration time constant is changed, the response is as shown in the fol-
lowing diagram.
Pn11
Speed Loop Gain
Setting range 1 to 3500 Unit Hz Default setting 50
Power OFF→ON
---
Pn12
Speed Loop Integration Time Constant
Setting range 1 to 1000 Unit ms Default setting 20
Power OFF→ON
---
When speed loop gain is low.
Time
Servomotor
speed
Ov
ershoots when speed loop gain is
high. (Oscillates when gain is too high.)
Servomotor
speed
Overshoots when speed loop integration time constant is small.
When speed loop integration
time constant is large.
Time

 Loading...
Loading...

