5-71
5-16 User Parameters
5
Operating Functions
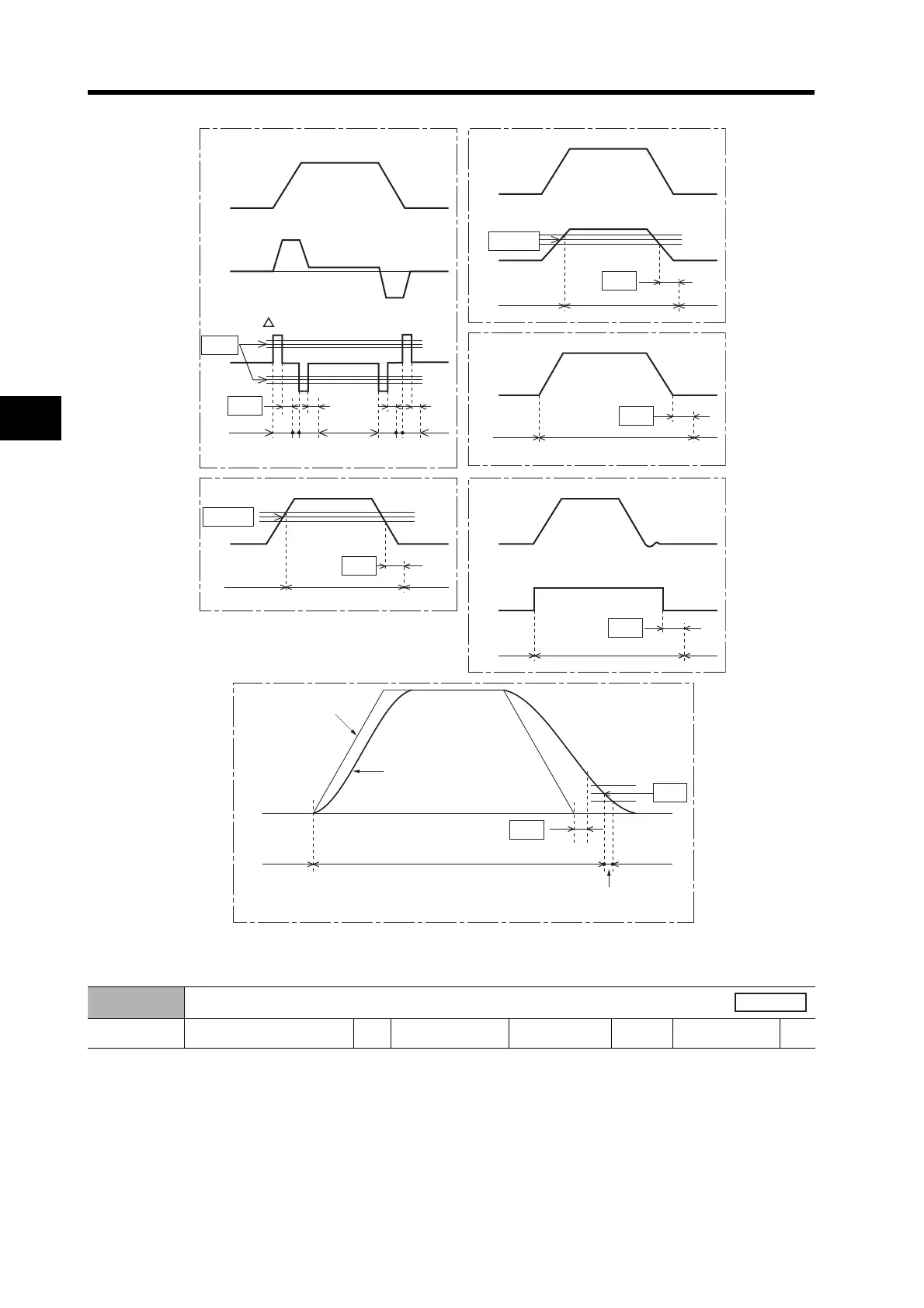
• For Position Control Mode, use this parameter to set the delay time when returning from gain 2 to
gain 1 if the Control Gain Switch 1 Setting (Pn31) is 3 or 5 to 10.
• For Speed Control Mode, use this parameter to set the delay time when returning from gain 2 to
gain 1 if the Control Gain Switch 1 Setting (Pn31) is 3 to 5.
• For Torque Control Mode, use this parameter to set the delay time when returning from gain 2 to
gain 1 if the Control Gain Switch 1 Setting (Pn31) is 3.
Pn32
Gain Switch 1 Time
Setting range 0 to 10000 Unit × 166 μs Default setting 30
Power OFF→ON
---
H
L
H
L
H
L
H
L
T
1
1
22 22
1
1
INP
H
L
Speed V
Figure A
Torque T
Accumulated pulses
Level
Level
Level
Speed V
Figure B
Figure C
Figure D
Figure E
Gain 1
Gain 1
Gain 1
Gain 1
Gain 1
Gain 1
Gain 2
Gain 2
Gain 2
Gain 2
Gain 2
Gain 1 Gain 1
Command
speed S
Speed V
Actual
speed N
Time
Time
Time
Time
Gain 1
Gain 1
Gain 1
Command
speed S
Actual
speed N
Figure F
Level
Time
Gain 2 is used only during the Speed Loop Integration Time Constant.
Gain 1 is used at other times.
Time
 Loading...
Loading...


