Parker Hannifin S.p.A. Divisione S.B.C. user’s manual TWIN-N and SPD-N
165
10.3.9 Profile position mode (operative mode 201)
In profile position mode (Pr31=201) the buffer of targets allowed is 2 elemets long one for the
profile in execution the other for the next, the motion profile type only valid value is 0
(trapezoidal profile with linear ramp).
10.3.9.1 Internal states
The profile position mode will control by the bits of the controlword and statusword.
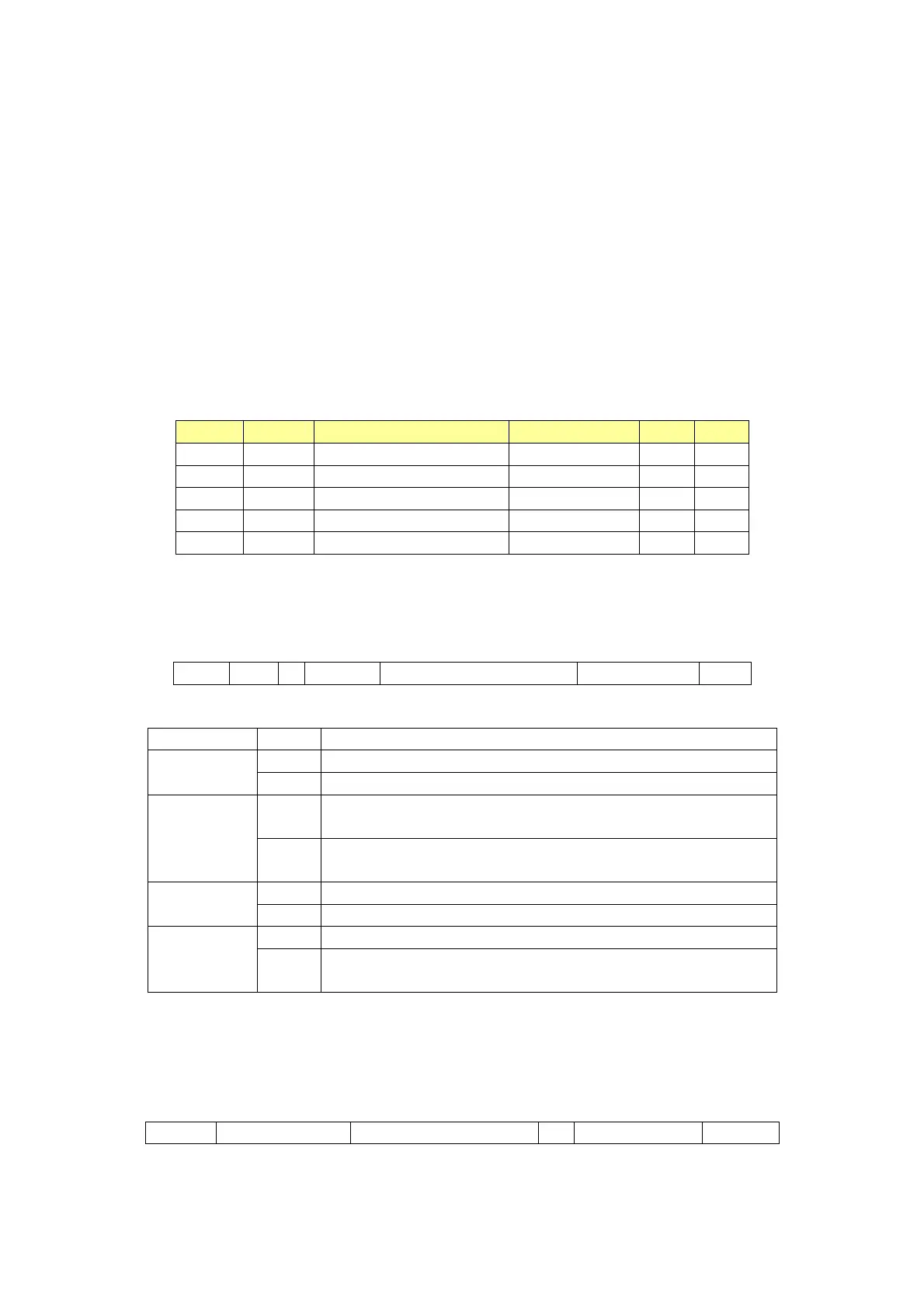
Index Object Name Type Attr. M/O
607Ah VAR
Target position
INTEGER32 rw M
6081h VAR
Profile velocity
UNSIGNED32 rw M
6083h VAR
Profile acc./dec.
UNSIGNED32 rw M
6085h VAR
Quick stop deceleration
UNSIGNED32 rw O
6086h VAR
Motion profile type
INTEGER16 rw M
10.3.9.1.1 Controlword of profile position mode
15 9 8 7 6 5 4 3 0
Halt abs / rel Change set immediately New set-point
MSB LSB
Name Value Description
0 Does not assume target position New set-
point
1 Assume
target position
0
Finish the actual positioning and then start the next
positioning
Change set
immediately
1
Interrupt the actual positioning and start the next
positioning
0 Target position is an absolute value
abs / rel
1
Target position is a relative value
0 Execute positioning Halt
1
Stop axle with
profile deceleration (if not supported with
profile acceleration)
Table 9: Profile position mode bits of the controlword
10.3.9.1.2 Statusword of profile position mode
15 14 13 12 11 10 9 0
Following error Set-point acknowledge Target reached
MSB LSB
 Loading...
Loading...
