Parker Hannifin S.p.A Divisione S.B.C. user’s manual TWIN-N and SPD-N
109
8 Programming digital inputs/outputs
8.1 The pico-PLC
The internal pico-PLC is used to connect the external world (inputs/outputs) with the world of
the parameters of the drive. The PLC can be used to copy digital input to a binary parameter,
to copy a binary parameter to a digital output and to execute mathematical and Boolean
operations. The PLC program must be inserted as a list of instructions by using the keyboard.
To change the instructions b99.13 must be set to zero
. The default parameter setting (b99.12)
corresponds to a PLC program (see
Appendix) written for a large number of applications. In
most cases it is not necessary to program the PLC itself.
The main features of the pico-PLC are:
Program steps 256
scanning time 6,144 ms
number of timers 2
number of instructions 15
stack depth 1
mathematical operations 16 / 32 bits
fast inputs 2 - (512 μs)
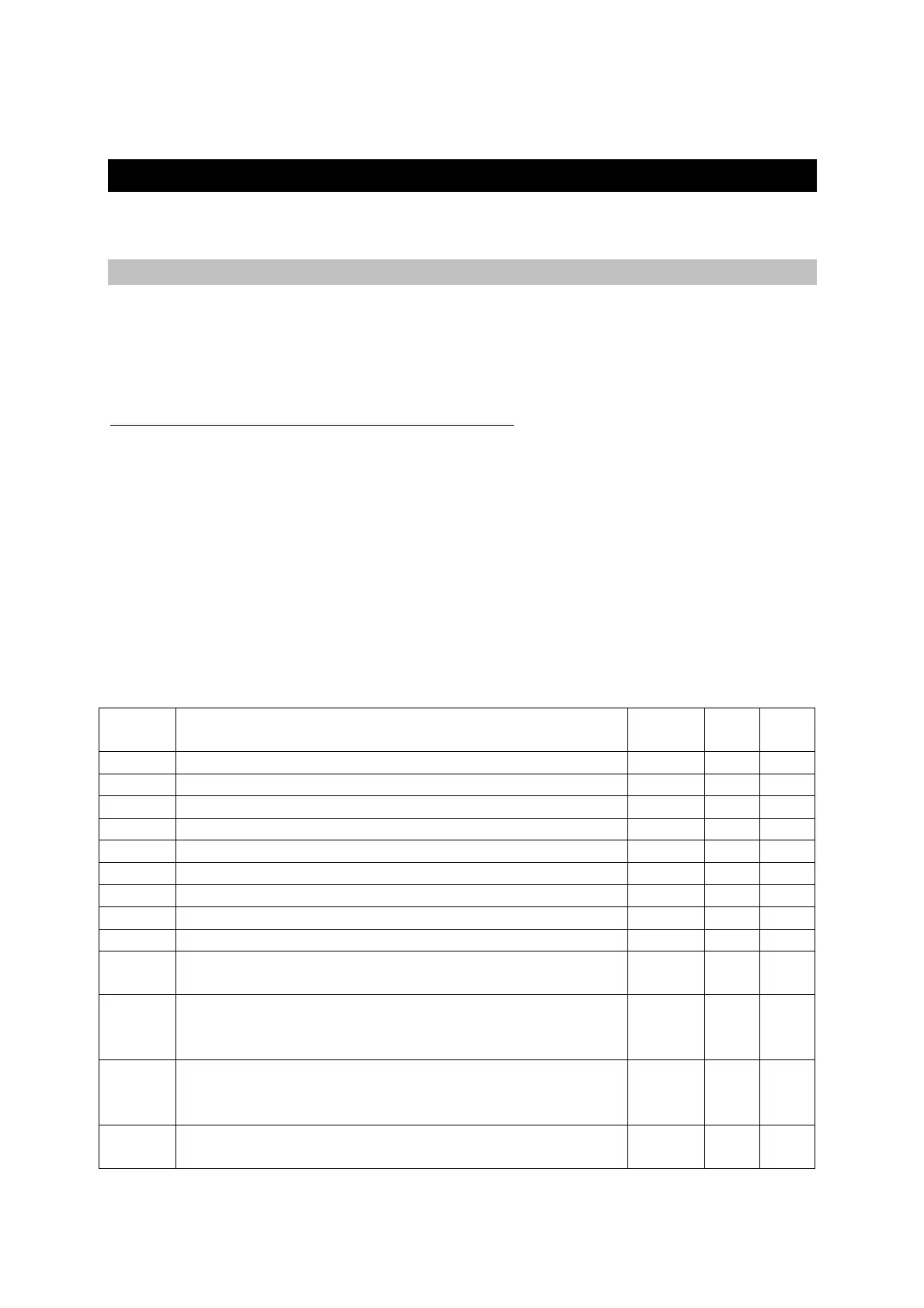
Decimal parameters PLC
Par. Description field
Unit
Def. Type
Note
Pr 71 Constant value=-1 Double Word
-1 R/W
Pr 72 Constant value =0 Double Word 0
Pr 73 Constant value =1 Double Word 1
Pr 74 Constant value =2 Double Word 2
Pr 75 Constant value =10 Double Word
10
Pr76 Constant value = 100 Double Word
100
Pr 77 Constant value = 1000. Double word.
1000
Pr 78 Constant value = 1024. Double word.
1024
Pr 79 Constant value = 4096. Double word.
4096
Pr80
÷Pr89
Free parameters. Parameters that can be stored and
available to the user (word).
±32767 0 R/W
M
Pr 92 First timer of the PLC. Every 6.144 ms, if Pr92 is
different to 0, it is decrement, if it is equal to zero,
b99.0=1.
0÷
32767
0 R/W
Pr 93 Second timer of the PLC. Every 6.144 ms, if Pr93 is
different to 0, it is decrement, if it is equal to zero
b99.1=1.
0÷
32767
0 R/W
Pr151
÷Pr163
Free parameters. Parameters that can be stored and
available to the user (word).
±32767 0 R/W
M
 Loading...
Loading...

