Parker Hannifin S.p.A. Divisione S.B.C. user’s manual TWIN-N and SPD-N
141
10.3 CANopen dsp402 (D version)
The CANbus node must be set through Pr49 with values from 1 to 127.
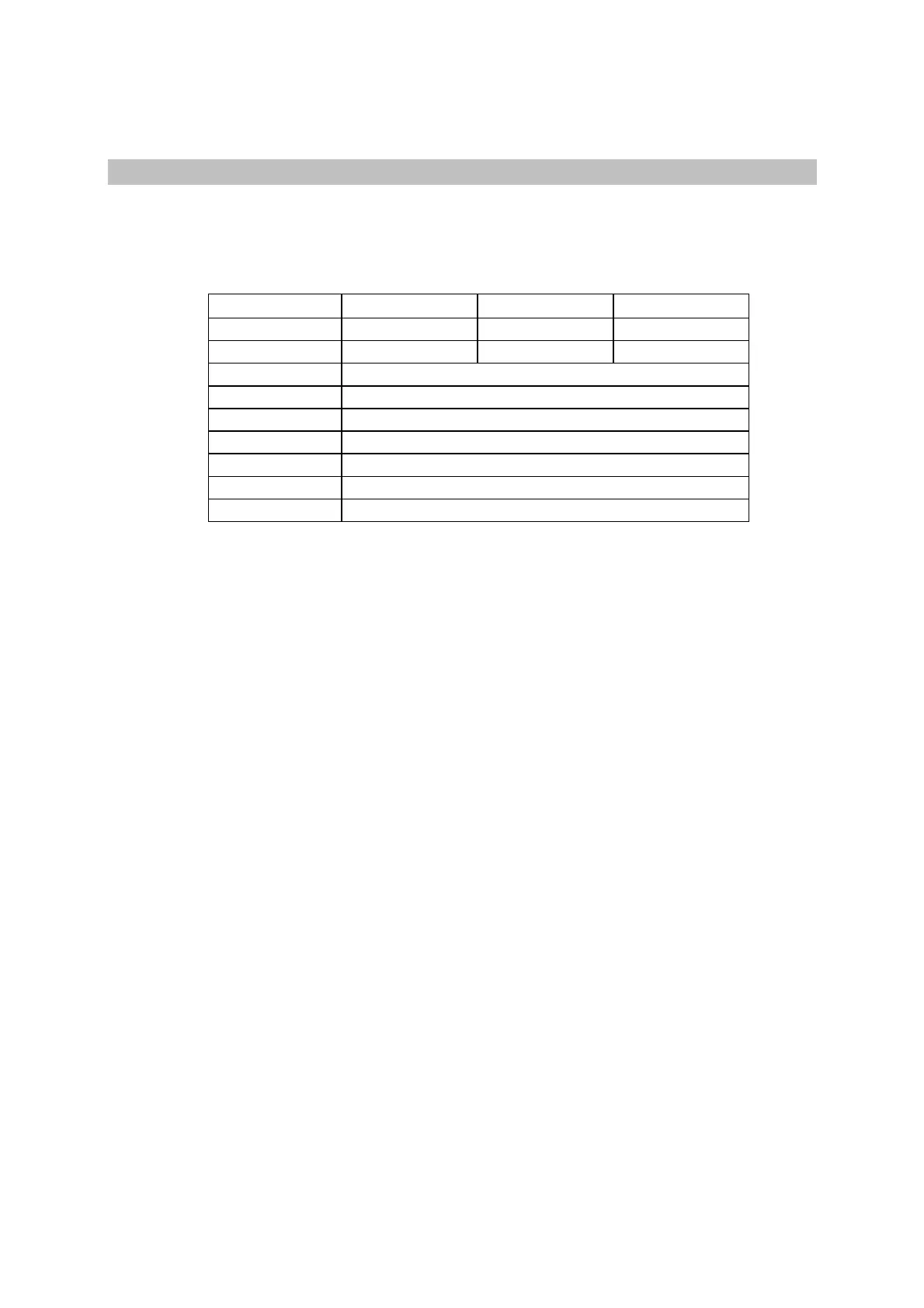
Transmission speed depends on Pr31, Pr48 e b150.4 as the following table:
All changes in speed, address or function mode are activated using the b42.3 command or
when the converter is powered on again.
In the CANopen implementation of drive an SDO channel is available (standard cob-id) with
a changeable timeout value mapped at the index 0x2020 as Unsigned 16 with a default value
of 5000 (1 unit 1.024 msec). Both standard guarding protocols are available , Node guarding
and heartbeat (the two cannot exist in the same time) Heartbeat is activated when a producer
heartbeat time is set different from 0.Three PDO channels PDO 1,2,4 from the predefined
standard connection set are available PDO 1 and 2 are serviced by a cyclic routine executed
every 2.048 msec and they are remappable (elements of 2 or 4 bytes can be mapped) the RTR
is allowed event time and inhibit time are active they can handle synchronous requests
serviced every 2.048 msec or they can be handled as event driven.
PDO 4 is the PDO channel used for strictly realtime operation as
controlling motor trajectory or position loop (the PDO is synchronous
type 1) no RTR is allowed and a restricted set of parameters can be
mapped , in particular:
PDO 4 rx : [0x6040] control word
[0x60c1][1] position reference in counts
[0x60c1][2] velocity reference in counts/sec
[0x60c1][3] velocity reference in rpm
PDO 4 tx : [0x6041] status word
[0x6063] position feedback in counts
[0x6064] position feedback in counts (normally in user unit in
this case as well in counts)
[0x2060] Word composed with digital input and aux analog input .
b0: In0
b1: In1
b2: In2
b3: In3
b4..b15 Analog input aux.
Pr48
Pr31≠15
Pr31=15 Pb150.4
0 125 kbps 1 Mbps 0
0 125 kbps 500 kbps 1
1 1 Mbps
2 500 kbps
3 250 kbps
4 125 kbps
5 50 kbps
6 20 kbps
7 10 kbps
 Loading...
Loading...
