Parker Hannifin S.p.A. Divisione S.B.C. user’s manual TWIN-N and SPD-N
169
OBJECT DESCRIPTION
INDEX 6086h
Name Motion profile type
Object Code VAR
Data Type INTEGER16
Category Conditional;
Mandatory, if pp or pv supported
ENTRY DESCRIPTION
Access rw
PDO Mapping Possible
Value Range INTEGER16
Default Value 0
10.3.9.3 Functional description
Two different ways to apply
target positions to a drive, are supported by this device profile.
Set of set-points: After reaching the
target position the drive unit immediately processes the
next
target position which results in a move where the velocity of the drive normally is not
reduced to zero after achieving a set-point.
Single set-point: After reaching the
target position the drive unit signals this status to a host
computer and then receives a new set-point. After reaching a
target position the velocity
normally is reduced to zero before starting a move to the next set-point.
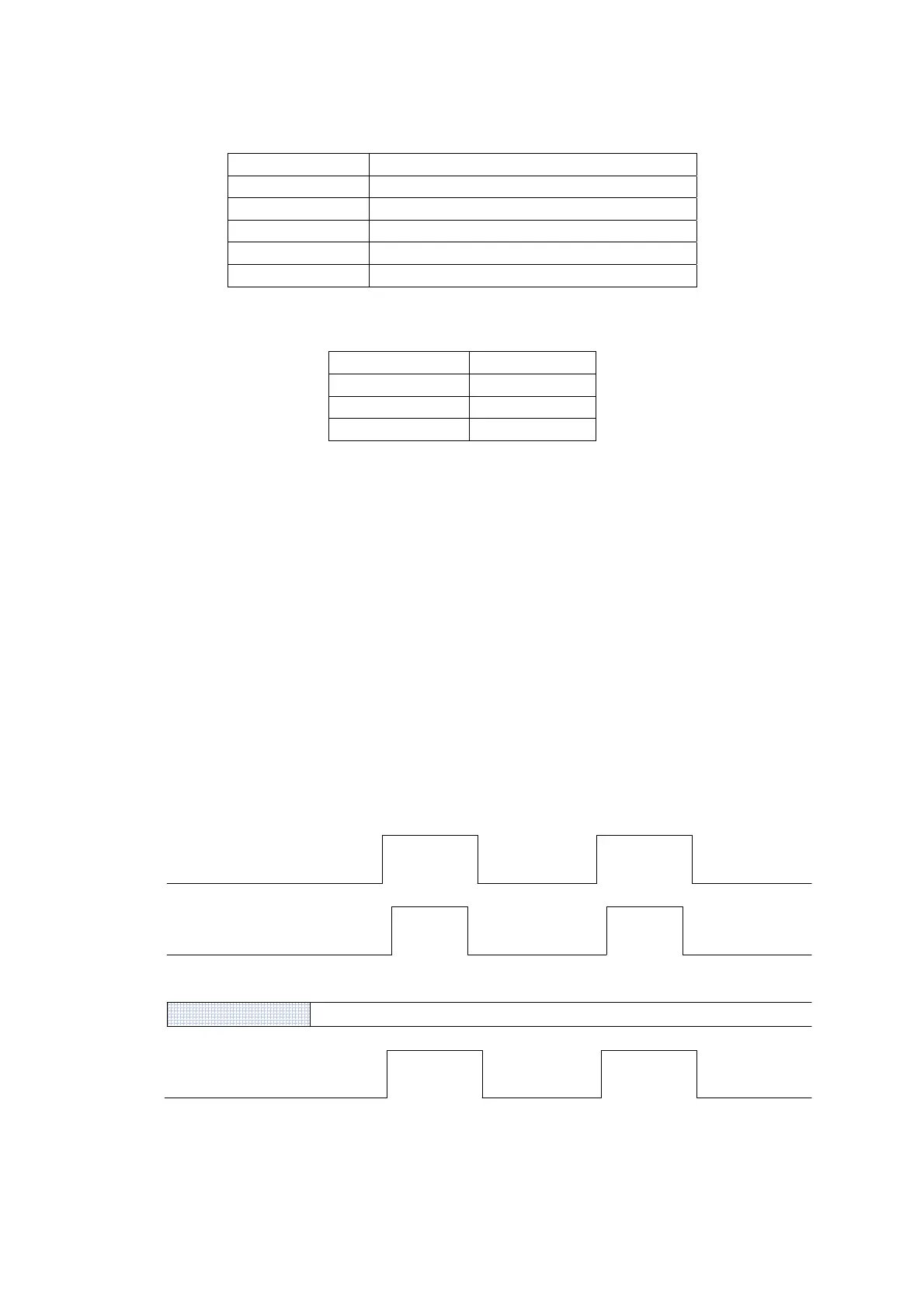
The two modes are controlled by the timing of the bits ‘
new set-point’ and ‘change set
immediately’ in the controlword and ‘set-point acknowledge’ in the statusword. These bits
allow to set up a request-response mechanism in order to prepare a set of set-points while
another set still is processed in the drive unit. This minimizes reaction times within a control
program on a host computer.
DATA
New setpoint
Change set
immediately
Setpoint
acknowledge
(1)
(2)
(3)
(4)
(5)
(6)
Figure 17: Set-point transmission from a host computer
 Loading...
Loading...
