Parker Hannifin S.p.A. Divisione S.B.C. user’s manual TWIN-N and SPD-N
172
10.3.10Interpolated Position Mode (operative mode 202)
In Interpolated Position Mode (Pr31=202) the cycle time is set in the object 0x1006
'communication cycle period' and depending on the value set in this object different ways of
regulation are possible.
If the value is less than 2500 µsec the position loop is executed at the moment the sync signal
is received the position reference received on the PDO is directly processed as target of the
position loop. If the value is more or equal than 2500 µsec the position reference received is
interpolated according the interpolation sub mode index 0x60c0 , the interpolation may be
cubic or linear.
If object 0x60c0 is 0 the interpolation algorithm is linear otherwise if –1 is cubic with both
position and velocity reference, if –2 is cubic with position reference only.
If on the synchronous PDO 4 rx it is not mapped the position reference the position loop is not
executed but the velocity reference received is set, the velocity reference may be supplied in
counts/sec or RPM respectively mapping object 0x60c1.2 or 0x60c1.3, in this case the
external controller executes position loop.
Note: In interpolated position mode factor group conversion are not active. If the cycle time is
less than 2500 µsec the feedforward of velocity may be computed by the drive (if bit 247.7 is
set) from the delta of position reference in the cycle time (gain of feedforward component
should be set accordingly with the cycle time). Otherwise feedforward of velocity may be sent
with PDO4 rx mapping in RPM units the object 0x60c1.3.
Depending on the different algorithms of interpolation there is a different delay between the
moment the target position is received on the PDO and validated by the sync and the moment
when the target position is active in the trajectory setpoint of the motor.
In case of cycle time less than 2500 µsec the position loop trajectory setpoint is immediately
upgraded with the last received position setpoint as soon as the sync signal is received.
In case of cycle time longer than 2500 µsec, both with linear interpolation and cubic
interpolation with position and velocity, the point specified in the target position received on
the PDO will be activated as trajectory setpoint at the end of the cycle time started with the
sync signal that validated the target position, so with a cycle time delay.
As last, in case of cycle time longer than 2500 µsec and cubic interpolation with position
reference only, the point specified in the target position received on the PDO will be activated
as trajectory setpoint at the end of the next cycle time started with the sync signal that
validated the target position, so with two cycle time delay.
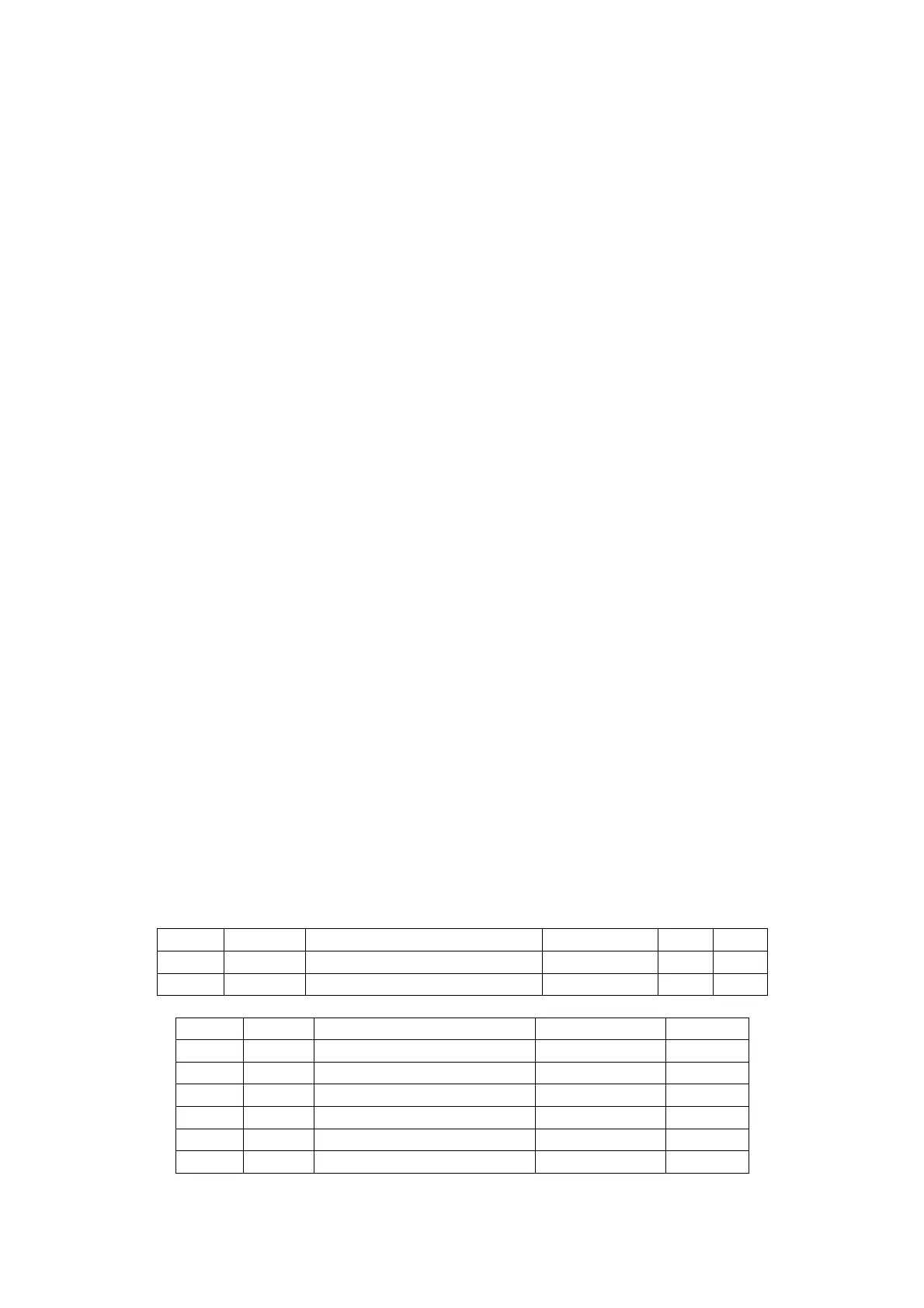
Index Object Name Type Attr. M/O
60C0h VAR Interpolation sub mode select INTEGER16 rw O
60C1h ARRAY Interpolation data record INTEGER32 rw O
Index Object Name Type Chapter
6040h VAR Controlword UNSIGNED16 dc
6041h VAR Statusword UNSIGNED16 dc
605Ah VAR Quick stop option mode INTEGER16 dc
6060h VAR Modes of operation INTEGER8 dc
6061h VAR Modes of operation display INTEGER8 dc
6063h VAR Position actual value* INTEGER32 pc
 Loading...
Loading...
