Parker Hannifin S.p.A Divisione S.B.C. user’s manual TWIN-N and SPD-N
100
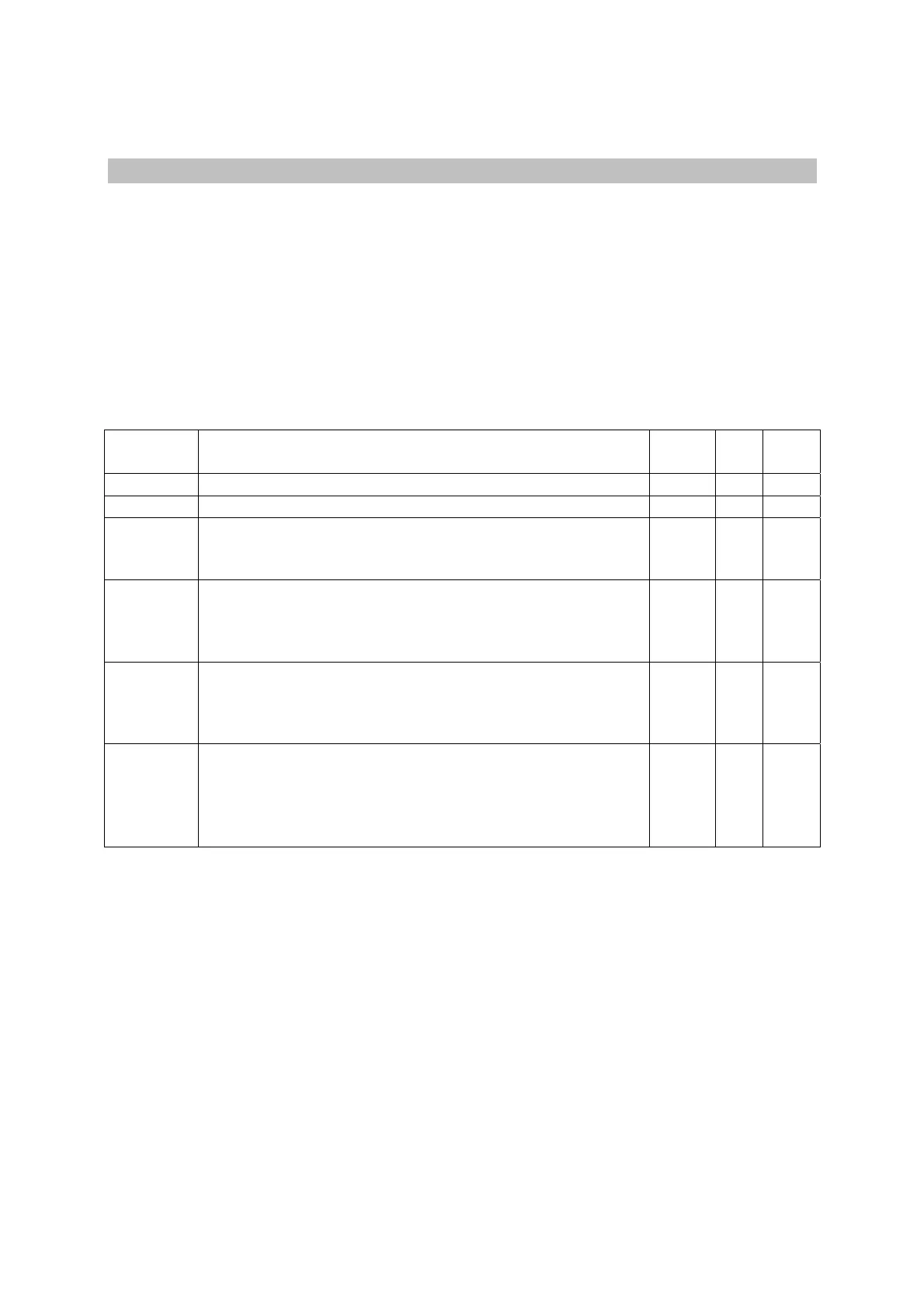
7.6 Position control through the CANbus (operating mode 15)
If the operating mode 15 is enabled, the drive will execute a Position loop of proportional
type with feed-forward, the profile generator is regarded as external and it will send the
information regarding the position and speed reference via CAN bus, according to the
SBCCAN protocol (see chapter CAN bus). If b70.1=0 the feedback is from resolver, if
b70.1=1 the feedback is from encoder.
OPERATING MODE 15 PARAMETERS
Par. Description Field
Unit
Def. Type/
Notes
Pr102
CAN bus status. (see the section on the CANBUS).
0 R/W
Pr103
CAN bus status. (see the section on the CANBUS).
0
R/W
Pr104
Feed-forward speed. The value of this parameter is
summed at the output of the position loop in order to
obtain the speed request Pr6.
±9000
[rpm]
0
R/W
Pr105
Feed-forward speed via CAN bus. This is the feed-
forward value received via the CAN bus. When the SYNC
(b150.8=1) is received, Pr105 will be copied to Pr104 and
will become active.
[rpm]
0 R/W
Pr114:115
Position reference via CAN bus. This is the position
reference received via the CAN bus. When the SYNC
(b150.8=1) is received, Pr114:115 will be copied to
Pr60:61 and will become active.
[count]
0
R/W
Pr116:117
Motor position via the CAN bus. When the SYNC
(b150.8=1) is received, Pr62:63 will be copied to
Pr116:117 and, if feedback transmission has been enabled
(b150.2=1), it will automatically be transmitted via the
CAN bus.
[count]
0
R/W
 Loading...
Loading...
