6
Operation
Axis module fault
Operating Instructions – MOVIDRIVE
®
modular
173
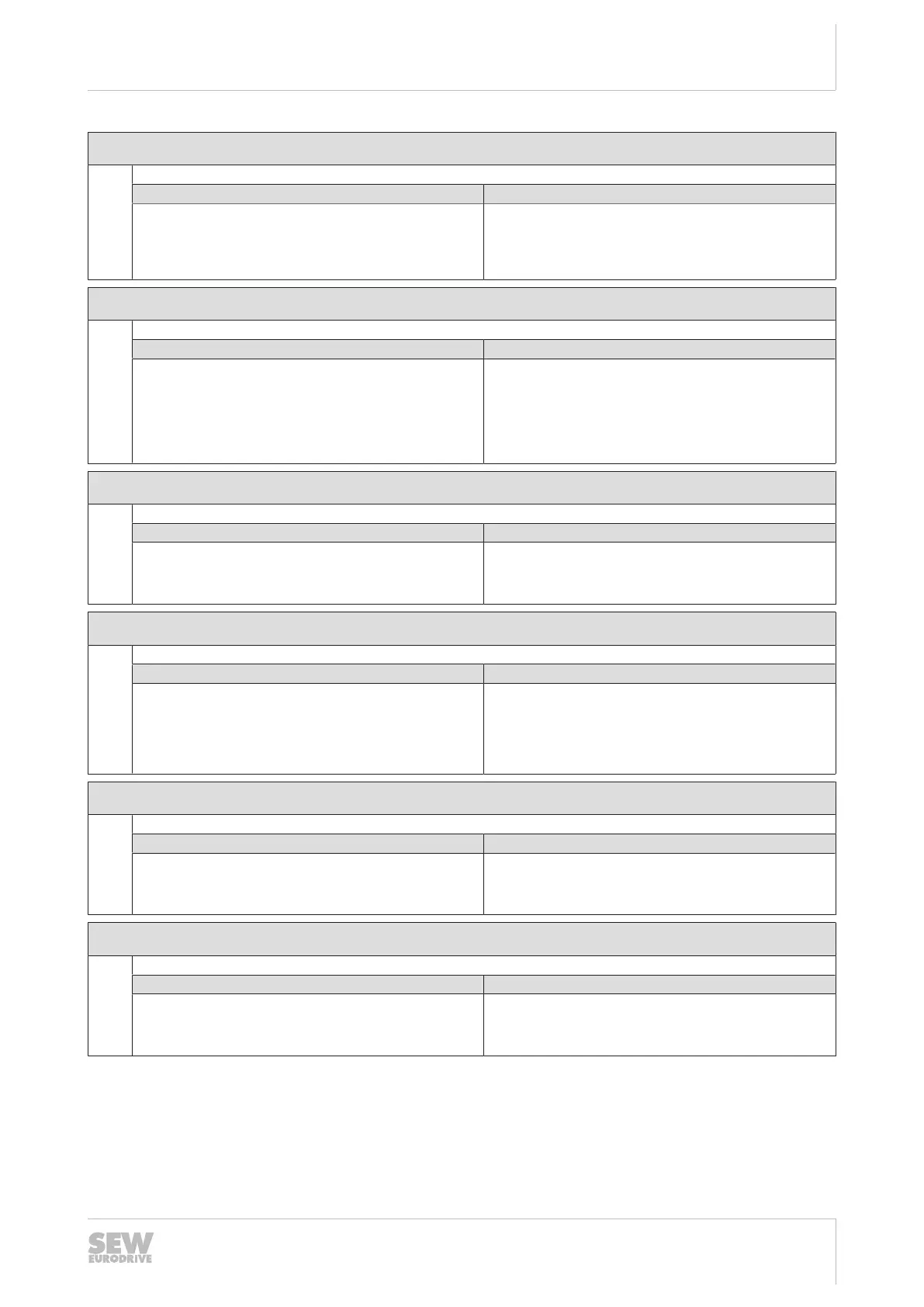
Subfault: 13.3
Description: Invalid data
Response: Encoder 1 – latest critical fault
Cause Measure
Invalid encoder nameplate data (measuring steps/pulses per
revolution/multi-turn)
– Check startup parameters.
– Replace encoder.
Note: In "emergency mode" manual mode, you can move the
drive using the motor encoder if the external position encoder
is faulty.
Subfault: 13.4
Description: Track measurement error
Response: Encoder 1 – latest critical fault
Cause Measure
Error during track measurement Switch the device off and on again.
– Check wiring.
– Check interference source (e.g. from EMC).
– Check encoder. Replace if necessary.
Note: In "emergency mode" manual mode, you can move the
drive using the motor encoder if the external position encoder
is faulty.
Subfault: 13.5
Description: Internal warning
Response: Encoder – warning
Cause Measure
Encoder signaled warning – Check wiring.
– Check interference source (light beam interrupted, reflector,
data cable, etc.).
– Clean sensor.
Subfault: 13.6
Description: Signal level too low
Response: Encoder 1 – latest critical fault
Cause Measure
Vector below permitted limit during signal level monitoring – Check wiring.
– Check interference source (e.g. from EMC).
– Check encoder.
Note: In "emergency mode" manual mode, you can move the
drive using the motor encoder if the external position encoder
is faulty.
Subfault: 13.7
Description: Signal level too high
Response: Encoder 1 – latest critical fault
Cause Measure
Vector exceeds permitted limit during signal level monitoring Check the gear ratio of the resolver in use.
Note: In "emergency mode" manual mode, you can move the
drive using the motor encoder if the external position encoder
is faulty.
Subfault: 13.8
Description: Signal level monitoring
Response: Encoder 1 – latest critical fault
Cause Measure
Vector exceeds permitted limit during signal level monitoring Check the encoder mounting position.
Note: In "emergency mode" manual mode, you can move the
drive using the motor encoder if the external position encoder
is faulty.
24748536/EN – 11/2017
 Loading...
Loading...