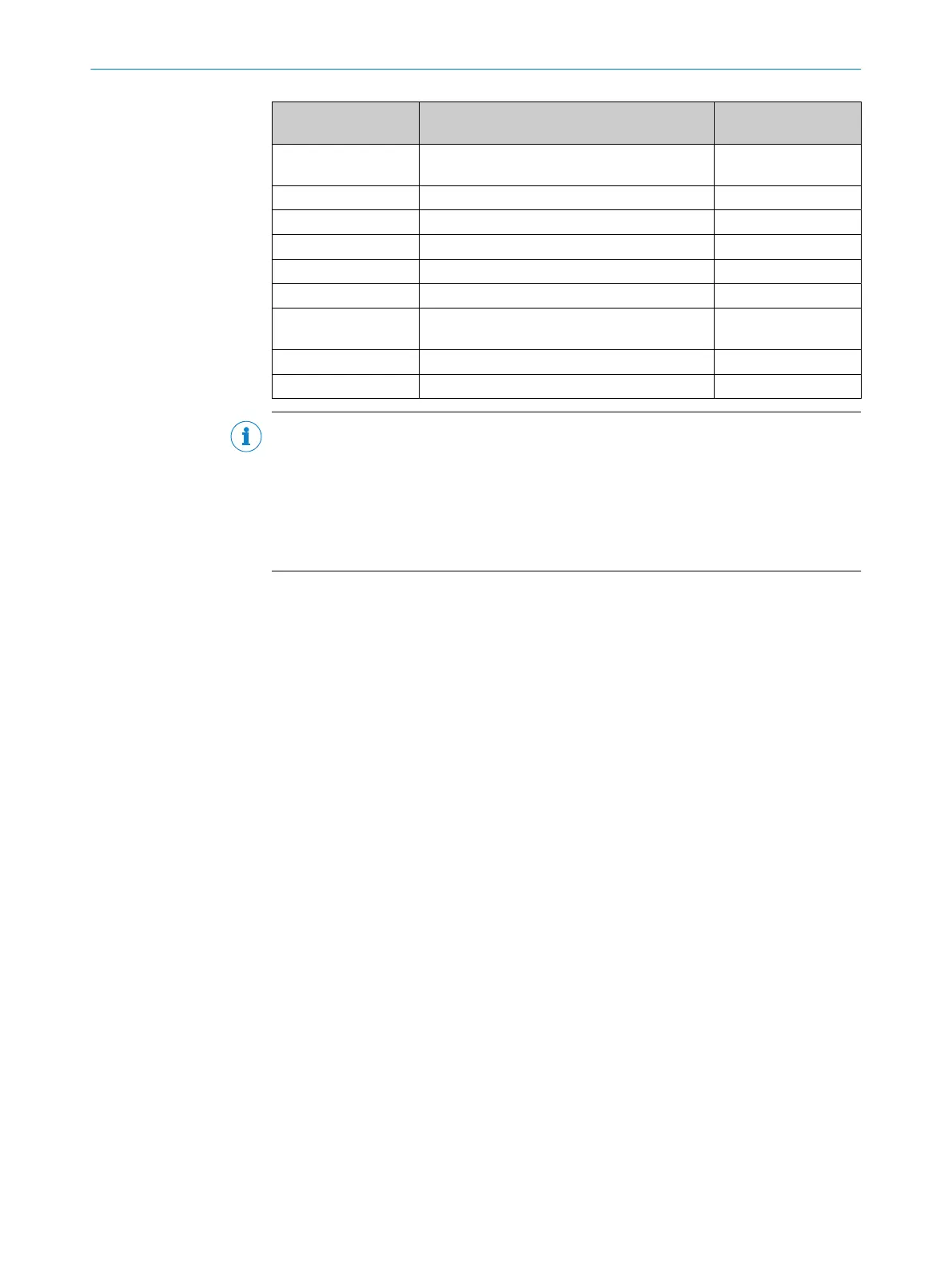
Attribute ID in the
position sensor object
Parameter Factory setting
82h Number of measured values from which a
mean value is formed
1
83h Bandwidth of the low pass filter 100
84h Hysteresis for the speed limit values 0
85h Hysteresis for the acceleration limit values 0
86h Limit of movement time in seconds 630,720,000
87h Operating time limit in seconds 630,720,000
88h Limit of the number of changes in the direction
of rotation
1,000,000
89h Limit of the number of clockwise starts 1,000,000
8Ah Limit of the number of counterclockwise starts 1,000,000
NOTE
The following parameters are not reset:
•
Movement time
•
Uptime
•
Lower limit of the temperature
•
Upper limit of the temperature
•
Maximum voltage supply
3.7.2 IP address
The IP address is required for identification of the encoder in the EtherNet/IP. This is
obtained for the encoder from a DHCP server (see "Assigning the IP address via DHCP",
page 46) or permanently entered via address switches (see "IP address setting",
page 44).
•
If the IP address is obtained via DHCP, then any address range is possible.
•
If the IP address is set via address switches, then the address range is set to
192.168.1.xxx.
3.7.3 Slave sign of life
The absolute encoder supports the slave sign-of-life functionality.
It is transmitted in bit 30 of the Fault header. It is used so that the controller can
determine whether the encoder is in operation even if the position data does not
change (e.g. at a standstill).
The bit changes its value in the configured update cycle.
The update cycle is formed from the requested packed interval (RPI) and an update
factor. The RPI can be between 5 and 750 ms:
Update cycle = RPI × update factor × 6
The update factor is determined with attribute 6Ah of the position sensor object (see
table 24, page 29).
The supported value depends on the RPI time of the encoder connection. The update
cycle should be at least twice as long as the RPI (so 1500 ms for RPI = 750 ms).
3.7.4 Code sequence
The code sequence determines at which direction of rotation, starting from a viewing
direction on the shaft, the position value increases.
3 PRODUCT DESCRIPTION
38
O P E R A T I N G I N S T R U C T I O N S | AFS/AFM60 EtherNet/IP 8014213/1EF3/2021-12-08 | SICK
Subject to change without notice

 Loading...
Loading...




