Functions
8.15 Brake functions
Control Units CU240S
Operating Instructions, 11/2006, A5E00766042B AA
8-79
U%LW
3
I
PLQ
3
3
3
U%LW
W
W
W
W
W
I
%UDNH
6WDWXV
0RWRUH[FLWDWLRQ
ILQLVKHG
212))2))
2))2))
21
2SHQ
&ORVHG
%UDNH5HOHDVH7LPH
%UDNH&ORVLQJ7LPH
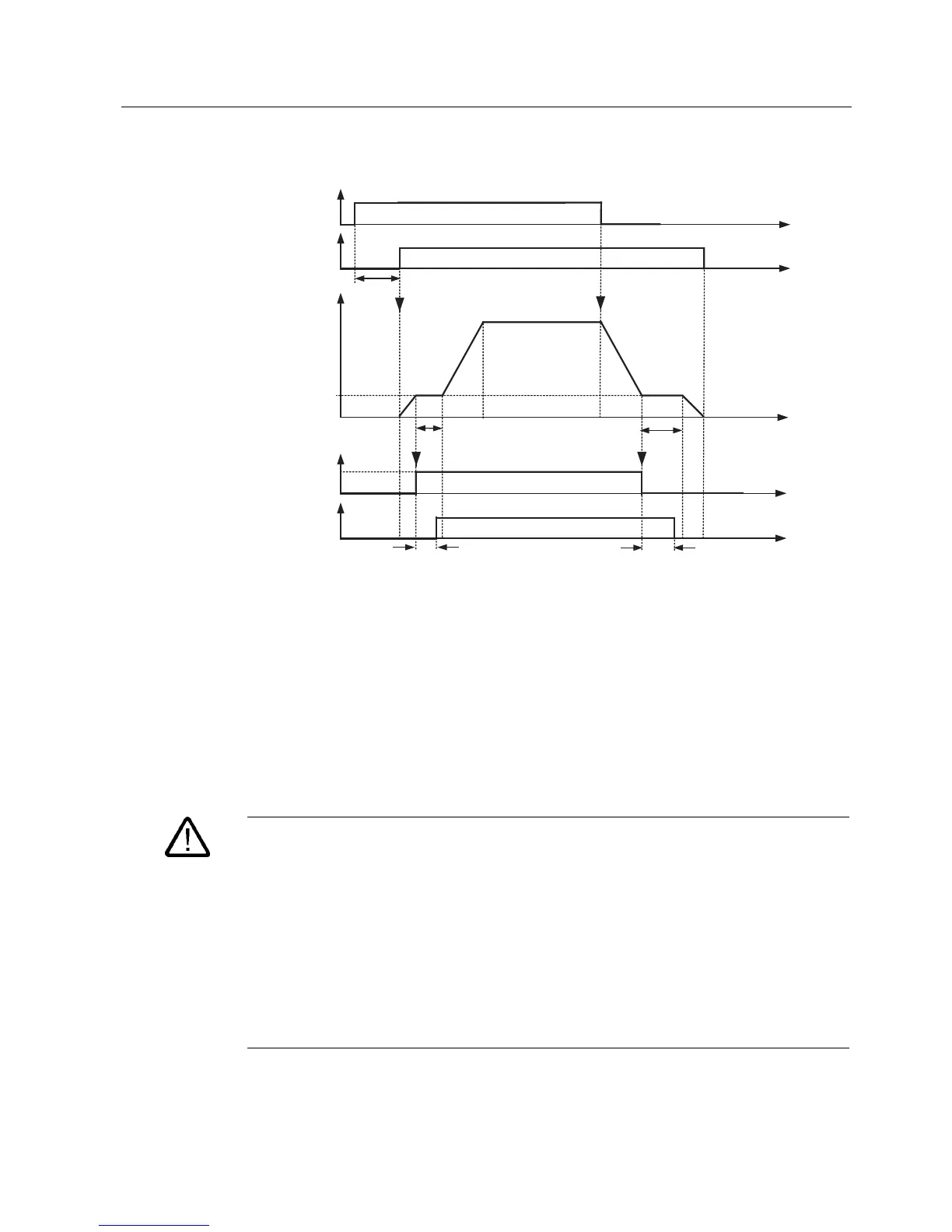
Figure 8-54 Motor holding brake after ON/OFF1 resp. ON/OFF3
The motor holding brake is either closed using OFF1 or OFF3. When the minimum
frequency P1080 is reached, the motor is operated at this frequency until the brake has been
applied (closing times of brakes are between 15 ms and 300 ms). The actual time is
specified using parameter P1217 "Holding time after ramp down" (see figure above). If, on
the other hand, an OFF2 command has been output, then independent of the motor state,
the status signal r0052 bit 12 "Brake active" is reset. This means that the brake immediately
closes after OFF2 (instant brake).
The mechanical brake is controlled using the status signal r0052 bit 12 "Brake active" of the
brake control. This signal is connected to terminal A and B of the power module.
Warning
It is not sufficient to select the status signal r0052 bit 12 "Brake active" in P0731 … P0733. In
order to activate the motor holding brake, in addition, parameter P1215 must also be set to
1.
If SINAMICS G120 controls the motor holding brake, then a series commissioning may not
be carried-out for potentially hazardous loads (e.g. suspended loads for crane applications)
unless the load has been secured. Potentially hazardous loads can be secured as follows
before series commissioning is started:
• Lower the load to the floor, or
• Clamp the load using the motor holding brake
(Caution: During the series commissioning, SINAMICS G120 must be prevented from
controlling the motor holding brake).
 Loading...
Loading...






