Functions
8.24 Open-loop and closed-loop control
Control Units CU240S
Operating Instructions, 11/2006, A5E00766042B AA
8-173
that the motor does not stall when accelerating, P1611 can be increased or the acceleration
pre-control can be used for the speed controller. This is also practical in order that the motor
is not thermally overloaded at low speeds.
For Vector control without speed actual value encoder the SINAMICS G120 has, in the low
frequency range, the following outstanding features with respect to other AC inverters:
● Closed-loop controlled operation down to ≈ 1 Hz
● Can start in the closed-loop controlled mode (immediately after the motor has been
energized)
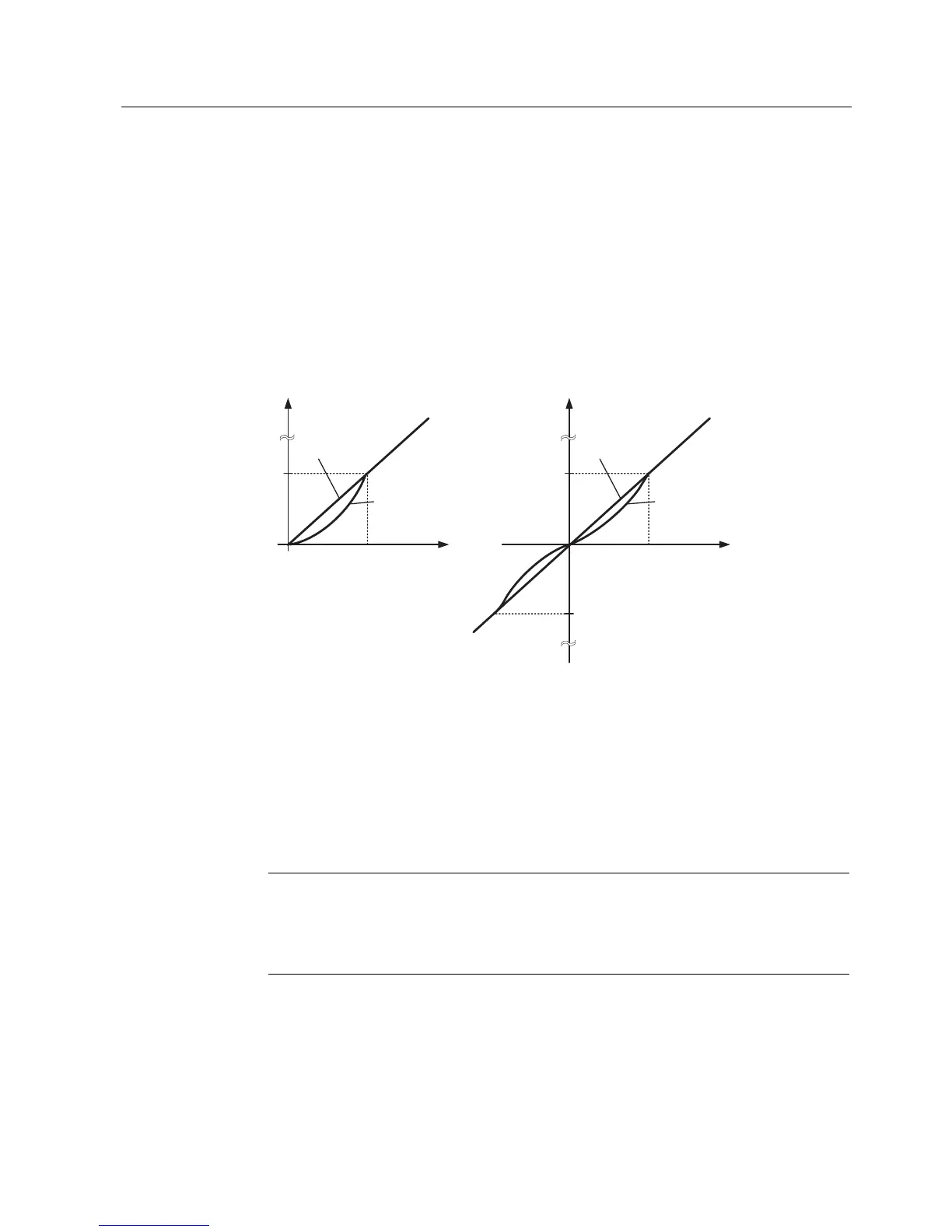
● The low frequency range (0 Hz) is passed-through in closed-loop controlled operation.
I
W
3
I
W
3
3
6WDUW
&ORVHGORRS &ORVHGORRS
=HURFURVVLQJ
2SHQORRS 2SHQORRS
Figure 8-90 Starting and passing through 0 Hz in closed-loop control
The following advantages are obtained as a result of closed-loop controlled operation down
to approx. 1 Hz (this can be selected using parameter P1755) as well as the possibility to
immediately start closed-loop controlled at 0 Hz or to reverse closed-loop controlled (this can
be set using parameter P1750):
● No changeover operation is required within the closed-loop control (smooth behavior –no
frequency dips)
● Continuous closed-loop speed-torque control is possible down to approx. 1 Hz.
Note
For closed-loop controlled reversing or closed-loop controlled starting from 0 Hz it must
be taken into account that when staying too long (> 2 s or > P1758) in the range around
0 Hz, that the closed-loop control automatically changes over from closed-loop into the
open-loop controlled mode.
 Loading...
Loading...






