Functions
8.24 Open-loop and closed-loop control
Control Units CU240S
Operating Instructions, 11/2006, A5E00766042B AA
8-181
.
3
7
Q
ಥ
ಥ
7
L
3&
3&
3&
7
L
.
3
7
Q
6/9&
9&
3
3
3
3
3
3
U
U U
U
'URRS
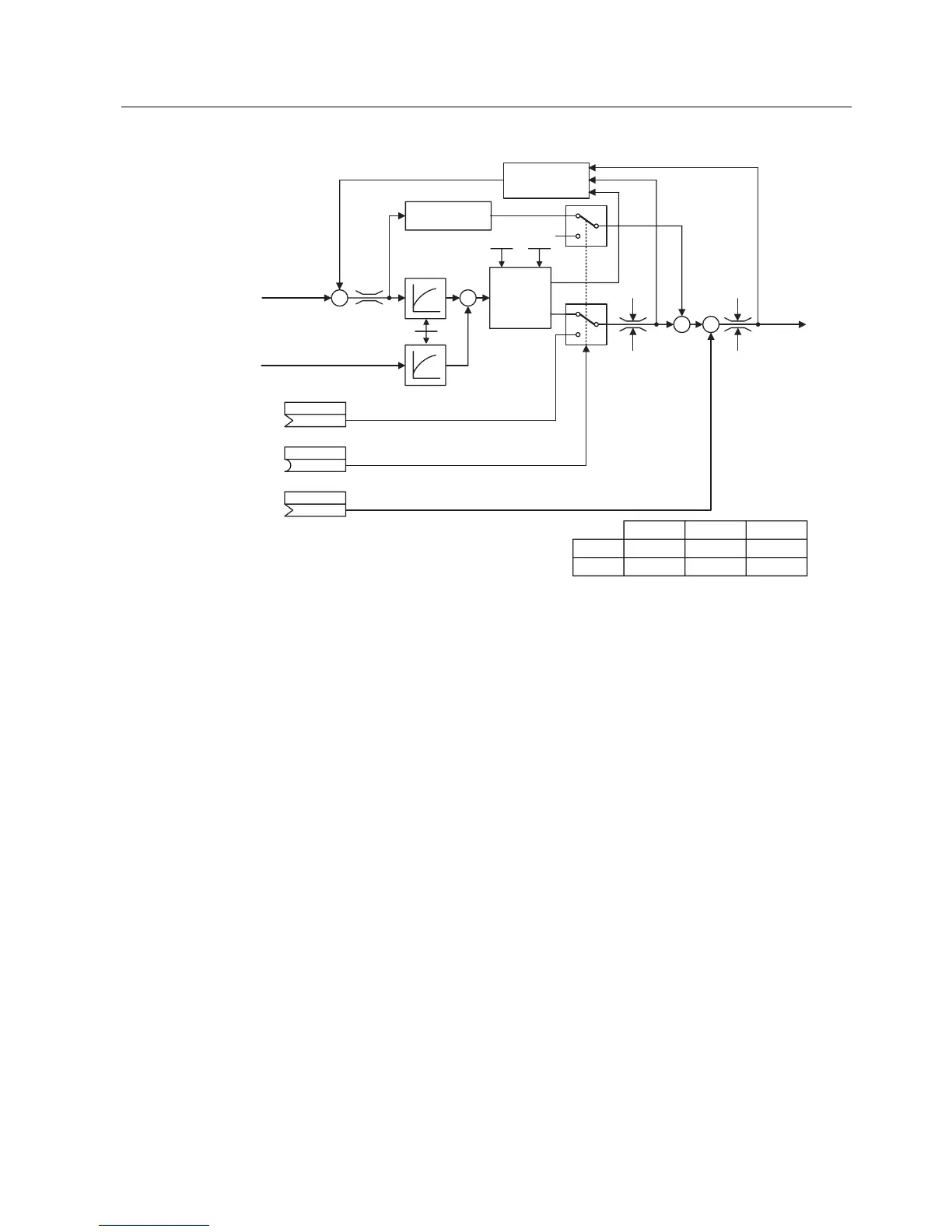
3UHFRQWURO
)UHTVHWSRLQW
$FWIUHTXHQF\
&,7RUTXHVHWSRLQW
%,යWRUTXHFWUO
&,$GGWUTVHWS
RQO\DFWLYHLISUHFRQWUROLVHQDEOHG3!
7RUTXH
VHSRLQW
3,
VSHHG
FRQWUROOHU
Figure 8-95 Closed-loop speed and torque control
The sum of both torque setpoints is limited in the same way as the torque setpoint of the
speed control. Above the maximum speed (plus 3%), a speed limiting controller reduces the
torque limits in order to prevent the motor accelerating any further.
A "real" closed-loop torque control (with automatically set speed) is only possible in the
closed-loop controlled range but not in the open-loop controlled range. In the open-loop
controlled range, the torque setpoint changes the setpoint speed through a ramp-up
integrator (integration time ~ P1499 * P0341 * P0342). This is the reason that sensorless
closed-loop torque control in the area around standstill (0 speed) is only suitable for
applications which require an accelerating torque and not a load torque (e.g. traversing
motors). For closed-loop torque control with sensors, this restriction does not apply.
If the closed-loop torque control is active, and a fast stop command (OFF3) is output, then
the system automatically changes-over to closed-loop speed control and braking of the
motor is started. If a normal stop command (OFF1) is output, there is no changeover.
Instead, the system waits until a higher-level control has brought the motor to a standstill, in
order to inhibit the pulses. This is necessary in order to allow the master and slave motors to
be shut down together. For P1300 = 22 or 23, for OFF1, the motor is directly powered-down
(as for OFF2).
 Loading...
Loading...






