Examples
4.2 Jerk
Acceleration (B2)
4-2 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
11
$&B295
$&B295
W>PV@
Y>PV@
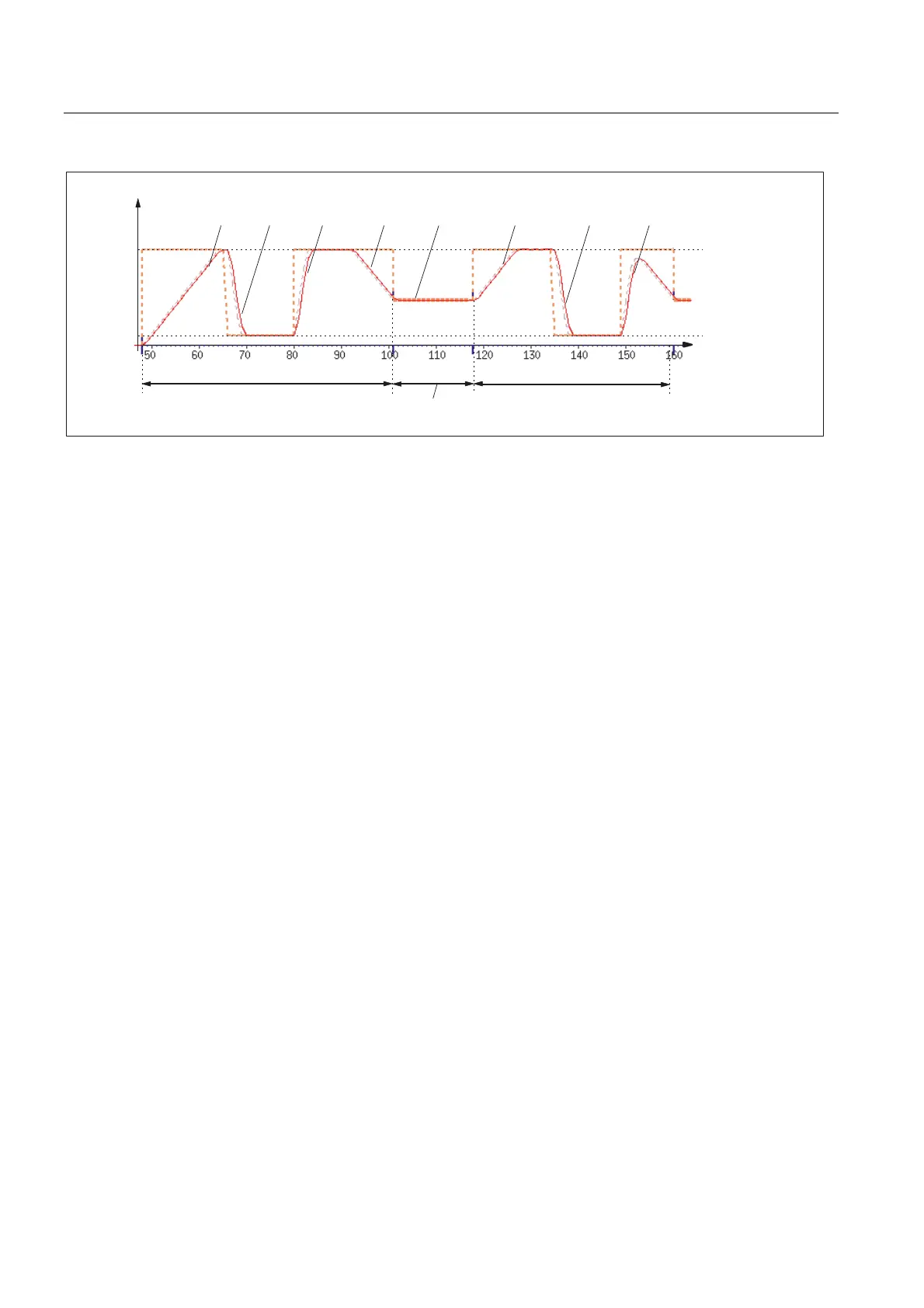
Fig. 4-1 Switching between path acceleration specified during preprocessing and real-time acceleration
Acceleration profile: BRISK
1: Accelerate to 100% of path velocity (F10000) in accordance with acceleration default: ACC (N2200...)
2: Brake to 10% of path velocity as a result of override modification ($AC_OVR) in accordance with real-time
acceleration $AC_PATHACC (N53/N54...)
3: Accelerate to 100% of path velocity as a result of override modification ($AC_OVR) in accordance with real-time
acceleration $AC_PATHACC (N53/N55...)
4: Brake to block end velocity for intermediate smoothing block in accordance with acceleration default: ACC
(N2200...)
5: Speed limitation as a result of smoothing (see 9)
6: Accelerate to 100% of path velocity ($AC_OVR) in accordance with acceleration default: ACC (N2300...)
7: Decelerate as a result of override modification at a rate of acceleration that is in accordance with real-time
acceleration $AC_PATHACC (N53/N54...)
8: Accelerate to 100% of path velocity as a result of override modification ($AC_OVR) in accordance with real-time
acceleration $AC_PATHACC (N53/N55...)
9: Intermediate block inserted within the control as a result of the programmed smoothing (RNDM) (N2200...)
4.2 4.2 Jerk
4.2.1 Path velocity characteristic
Key statement
An excerpt from a part program is provided below, together with the associated acceleration
characteristic, by way of an example. These are used to illustrate how the path velocity can
be adapted to take account of various events and the resulting change in jerk.

 Loading...
Loading...














