=
<
;
=
;
<
%16
%16
%16
(16
(16
(16
3B,)5$0(
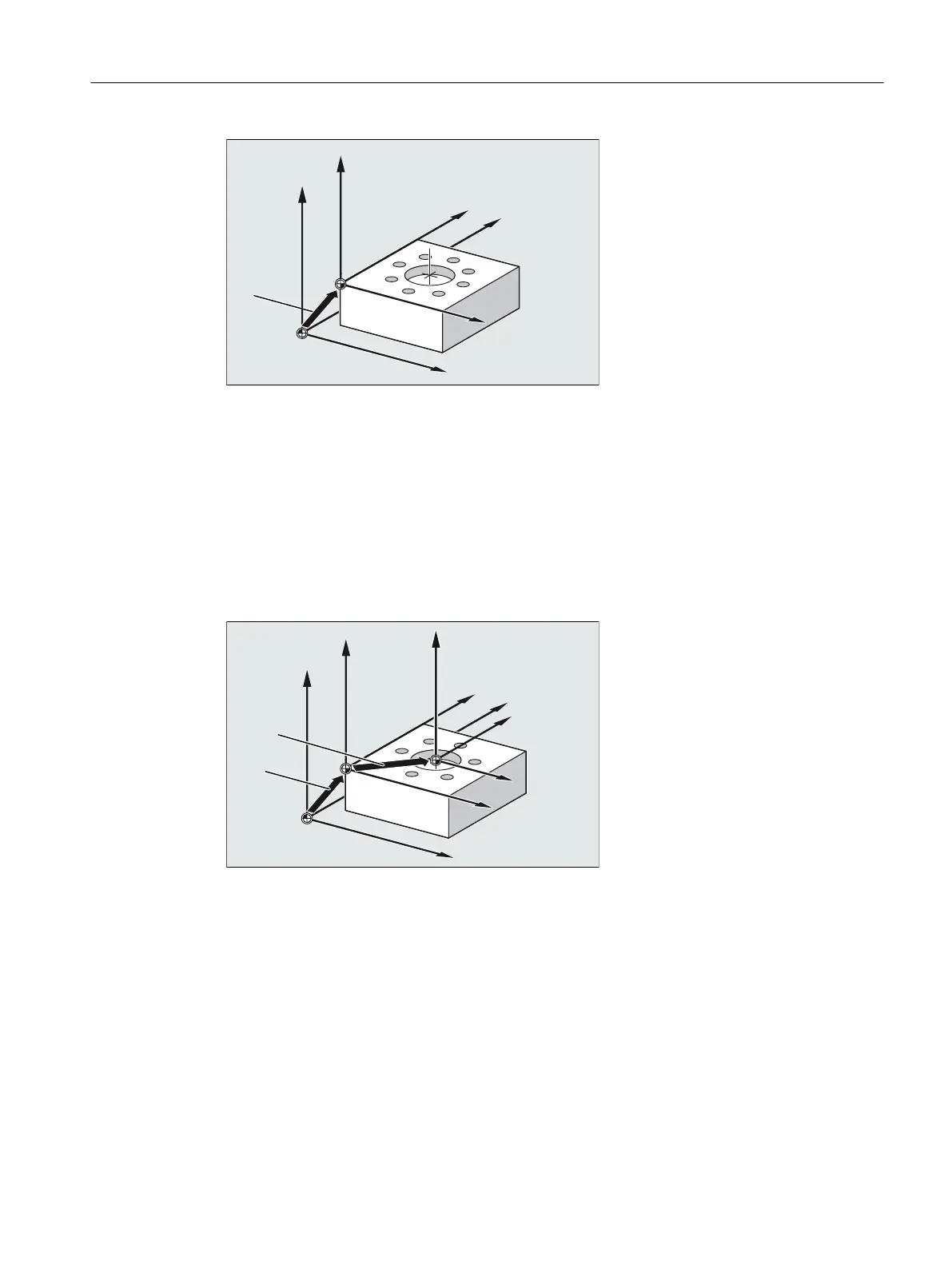
Active: Channel-specific programmable frame $P_PFRAME
The $P_PFRAME frame variable defines the reference between the settable zero system
(SZS) and the workpiece coordinate system (WCS).
$P_PFRAME contains the resulting frame, that results
● From the programming of TRANS/ATRANS, ROT/AROT, SCALE/ASCALE, MIRROR/
AMIRROR or
● From the assignment of CTRANS, CROT, CMIRROR, CSCALE to the programmed FRAME
=
%16
<
;
%16
=
;
=
(16
(16
;
(16
%16
<
<
:.6
:.6
:.6
3B,)5$0(
3B3)5$0(
Active: Total frame $P_ACTFRAME
The total frame active in the channel results from the chaining of all frames acting in the
channel.
$P_ACTFRAME = $P_PARTFRAME : $P_SETFRAME : $P_EXTFRAME :
$P_ISO1FRAME : $P_ISO2FRAME : $P_ISO3FRAME :
$P_ACTBFRAME : $P_IFRAME : $P_GFRAME :
$P_TOOLFRAME : $P_WPFRAME : $P_TRAFRAME :
$P_PFRAME : $P_ISO4FRAME : $P_CYCFRAME
$P_ACTFRAME describes the currently valid workpiece coordinate system.
Work preparation
3.8 Coordinate transformations (frames)
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 631
 Loading...
Loading...














