=
%16
<
;
%16
=
=
<
;
<
;
(16
(16
(16
%16
;
=
:.6
:.6
:.6
%.6
%.6
3B$&7%)5$0(
3B,)5$0(
3B3)5$0(
3B$&7)5$0(
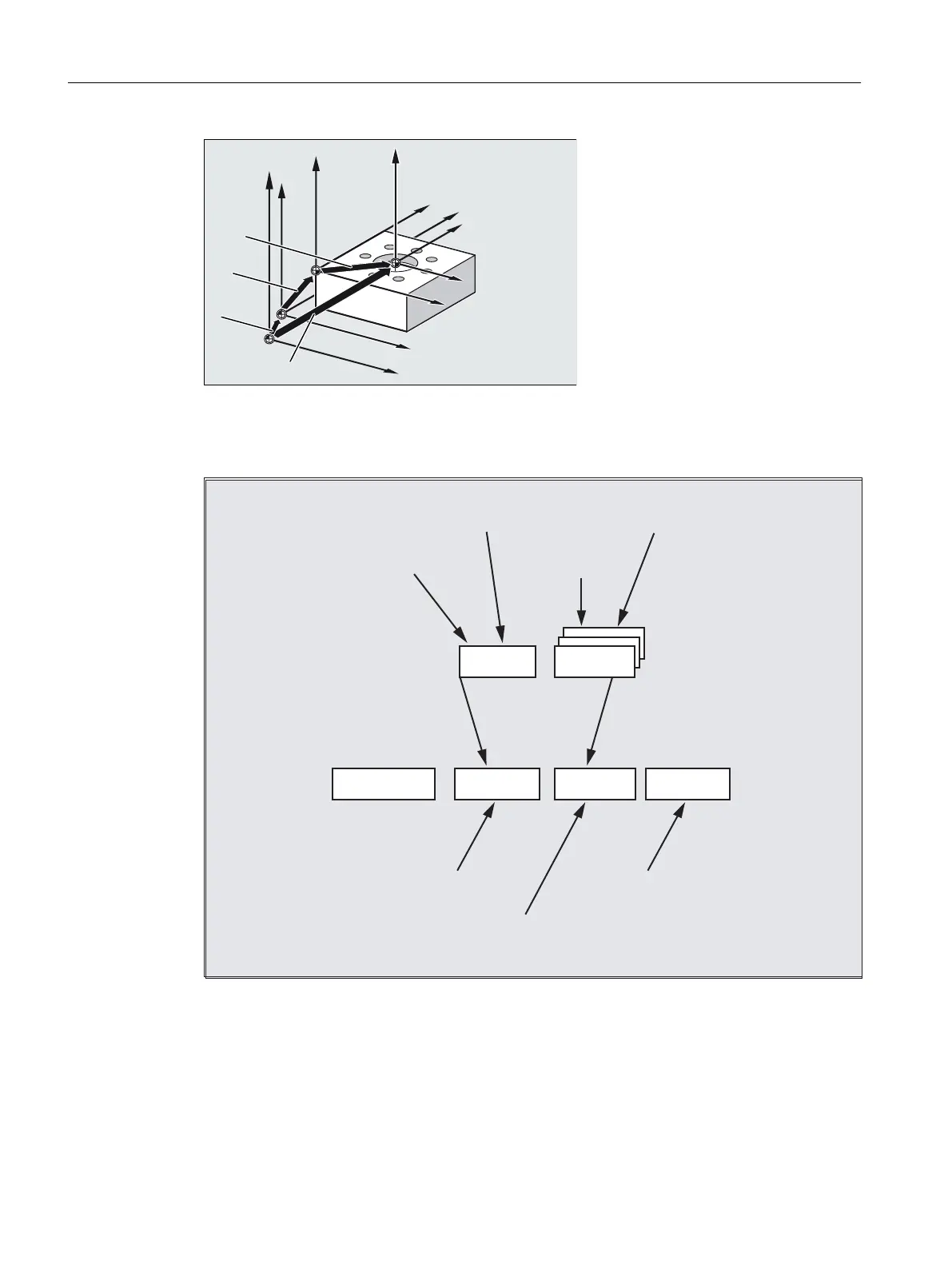
Figure 3-2 Frame variable $P_ACTFRAME
If one of the following frames $P_BFRAME / $P_CHBFRAME[<n>], $P_IFRAME or $P_PFRAME
is changed, the current total frame $P_ACTFRAME is recalculated.
3B3)5$0(
3B8,)5>Q@3B8%)5
3B$&7)5$0(3B%)5$0(3B,)5$0(
,QSXWIURPSURJUDPHJ
3B3)5$0( &75$16;
RU75$16;
,QSXWIURPSURJUDPHJ
3B,)5$0( &75$16;
,QSXWIURPSURJUDPHJ
3B%)5$0( &75$16;
,QSXWIURPSURJUDPHJ
3B8,)5>Q@ &75$16;
,QSXWIURP
+0,00&
,QSXWIURPSURJUDPHJ
3B8%)5 &75$16;
,QSXWIURP
+0,00&
DFWLYDWHGYLD
***
Basic frame and settable frame are effective after Reset if MD 20110 RESET_MODE_MASK
is set as follows:
Bit0=1, bit14=1 --> $P_UBFR (basic frame) acts
Bit0=1, bit5=1 --> $P_UIFR [$P_UIFRNUM](settable frame) acts
Work preparation
3.8 Coordinate transformations (frames)
NC programming
632 Programming Manual, 12/2019, 6FC5398-2EP40-0BA0
 Loading...
Loading...














