$P_PFRAME Current programmable frame
$P_PFRAME is the programmable frame that results from the programming of TRANS/
ATRANS, G58/G59, ROT/AROT, SCALE/ASCALE, MIRROR/AMIRROR or from the
assignment of CTRANS, CROT, CMIRROR, CSCALE to the programmable frame.
Current, programmable frame variable that establishes the reference between the settable
zero system (SZS) and the workpiece coordinate system (WCS).
P_ACTFRAME Current complete frame
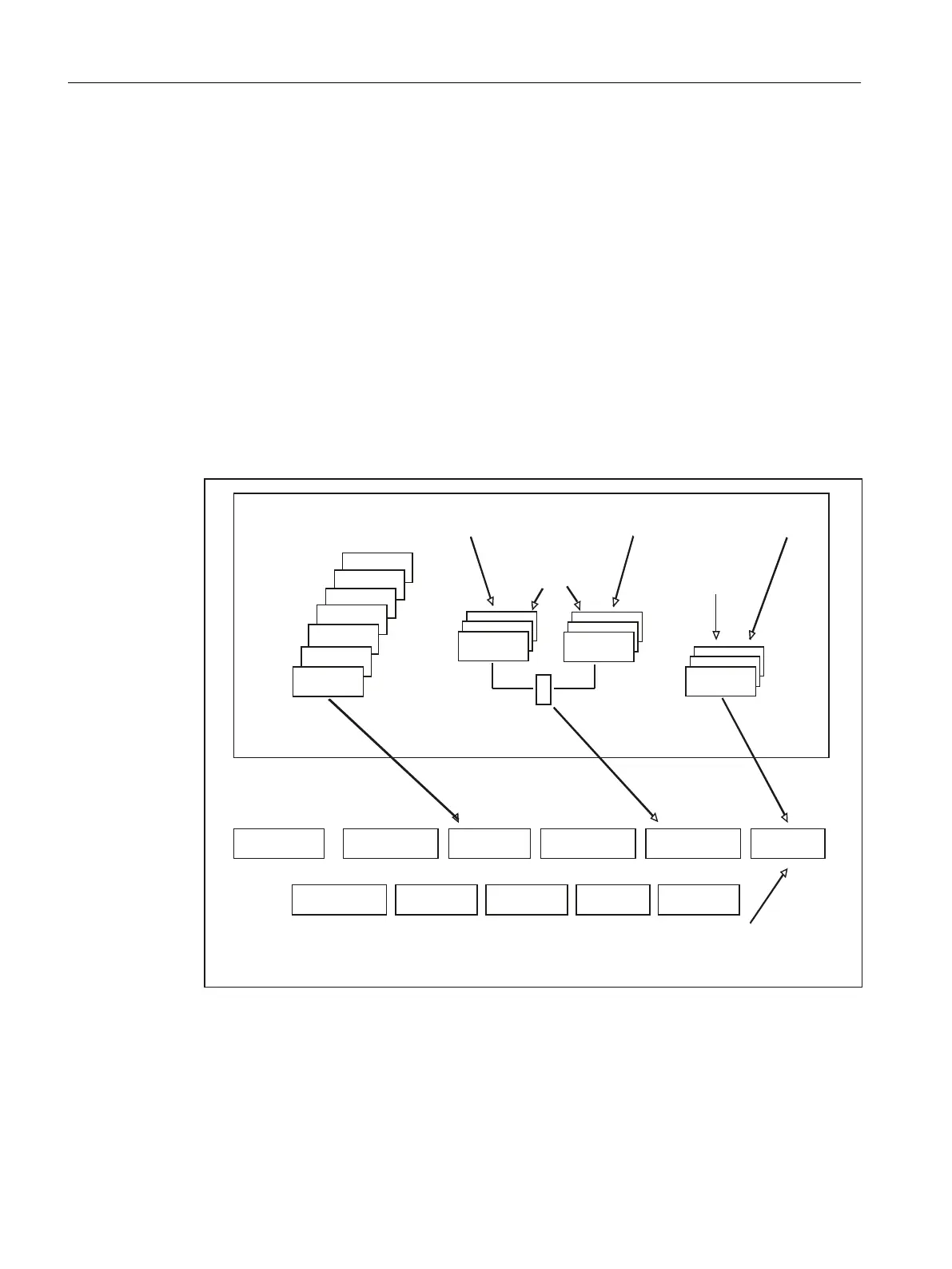
The resulting current complete frame $P_ACTFRAME is now a chain of all basic frames, the
current settable frame and the programmable frame. The current frame is always updated
whenever a frame component is changed.
$P_ACTFRAME corresponds to:
$P_PARTFRAME : $P_SETFRAME : $P_EXTFRAME : $P_ACTBFRAME : $P_IFRAME :
$P_TOOLFRAME : $P_WPFRAME : $P_TRAFRAME : $P_PFRAME : $P_CYCFRAME
&RPSOHWHIUDPH
$FWLYHFRPSOHWHIUDPH
'DWDPDQDJHPHQWIUDPHV
&KDQQHOVSHFLILF
V\VWHPIUDPHV
&KDQQHOVSHFLILF1&8
EDVLFIUDPHV
1&8JOREDO
IUDPHV
,QSXWYLDSURJUDPHJ
,QSXWYLD
+0,
$FWLYDWHGYLD
,QSXWYLDSURJUDPHJ
$FWLYDWHGYLD
,QSXWYLDSURJUDPHJ
,QSXWYLDSURJUDPHJ,QSXWYLDSURJUDPHJ
RU
,QSXWYLD
+0,
3B75$)5$0(
3B722/)5
3B3$57)5
3B&<&)5
3B:3)5
3B6(7)5
3B(;7)5
3B75$)5
3B:3)5$0(3B&<&)5$0(3B3)5$0(
***
3B(;7)5$0(6(7)5$0(
3B722/)5$0(
3B$&7%)5$0(3B,)5$0(
3B1&%)5 &75$16;
3B1&%)5>Q@
3B&+%)5>Q@
75$16;
3B3)5$0( &75$16;
3B,)5$0( &75$16;
3B1&%)5$0(>@ &75$16;
3B8,)5>Q@ &75$16;3B&+%)5 &75$16=
***
3B8,)5>Q@
3B$&7)5$0(3B3$57)5$0(
Work preparation
3.8 Coordinate transformations (frames)
NC programming
652 Programming Manual, 12/2019, 6FC5398-2EP40-0BA0
 Loading...
Loading...














