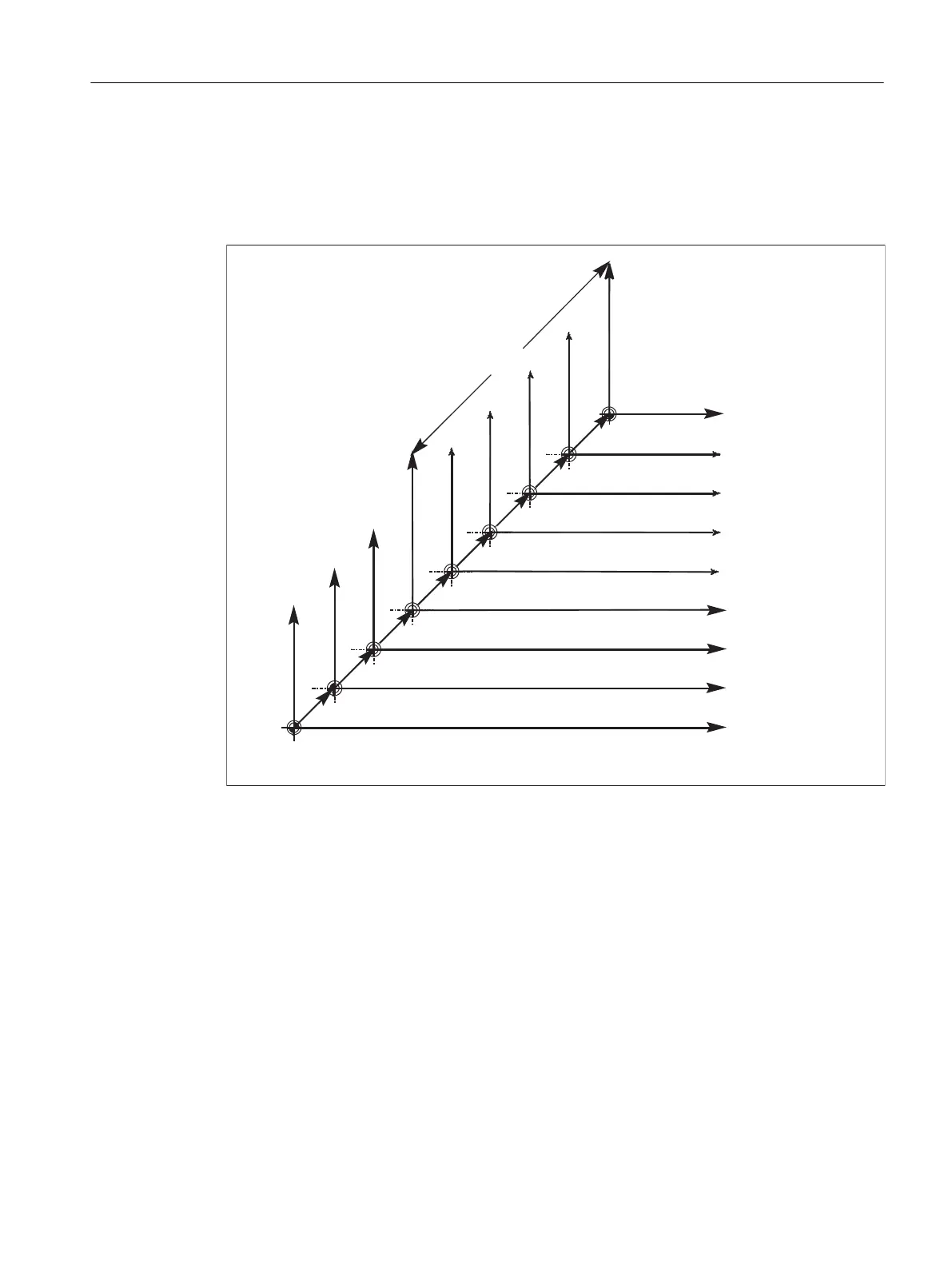
Frame chaining
The current frame is composed of the complete basic frame, the settable frame, the system
frame and the programmable frame in accordance with the current complete frame specified
above.
Kinematic transformation
Handwheel (DRF) offset, superimposed movement,[zero offset
external]
G54 ... G599 set frame,channel-spec. or
NCU-global
Chained array of basic frames, channel-spec.
and/or NCU global
MCS = Machine Coordinate System BCS = Basic Coordinate System WCS = Workpiece Coordinate System
BZS = Basic Zero System SZS = Settable Zero System
Frame chain
Home position offset
Chained system frames for PAROT, set actual value, scratching,
zero offset external
Frame for cycles, programmable frame;
transformations
System frame for TOROT (TOFRAME),
workpieces
MCS
WCS
SZS
BZS
BCS
Work preparation
3.8 Coordinate transformations (frames)
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 653
 Loading...
Loading...














