381291/C
117
Emergencyloweringandhoistingusingthetwocontactors
IncaseofemergencyitispossibletobypassthecontrollogicintheMotorControlUnit.
Youcancontrolthehoistingmotordirectlyusingthetwodesignatedcontactors.
Prerequisites
Youneedasuitablescrewdriver
oralargecointoopenthe
MotorControlUnitcabinet.
Youalsoneedasmall
screwdriver.3-phasevoltage
forthehoistingmotoris
available.
Context
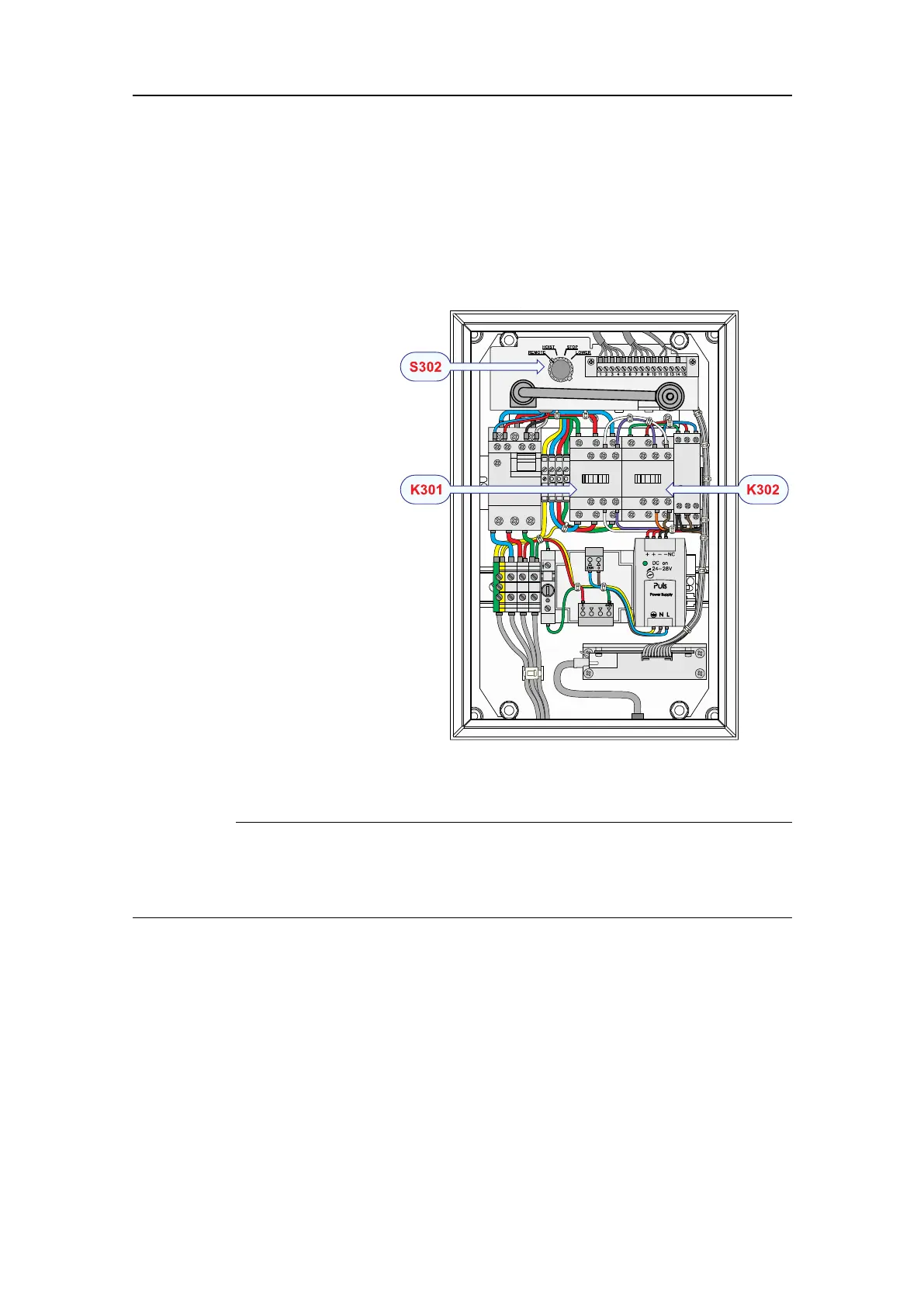
Thetwocontactorsare
identiedasK301andK302.
TheHoistingContactor(K301)
andtheLoweringContactor
(K302)arelocatedontheupper
DINrailintheMotorControl
Unit.
•Leftside:Whenactivated,
theHoistingContactor
(K301)startsthemotorin
ordertohoistthetransducer.
•Rightside:TheLowering
Contactor(K302)startsthemotortolowerthetransducer.
WARNING
Thisoperationoverridestheupperandlowerlimitswitches.Thecontactorsmust
bereleasedbeforethetransducerreachesupperorlowerposition.Failuretodo
somayresultinseriousmechanicaldamagetothehullunit.
Procedure
1Makesurethatyouhavesufcientwaterdepthbelowthekeelbeforeyoulower
thetransducer.
Ifyourvesselisindrydock,makesurethatyouhavesufcientheightbetween
thehullandthedrydockoor.Thespaceunderthehullmustbefreefromtools,
scaffolding,personnelandotherobstacles.
Operatingprocedures