EA180 Servo Drive Manual
100
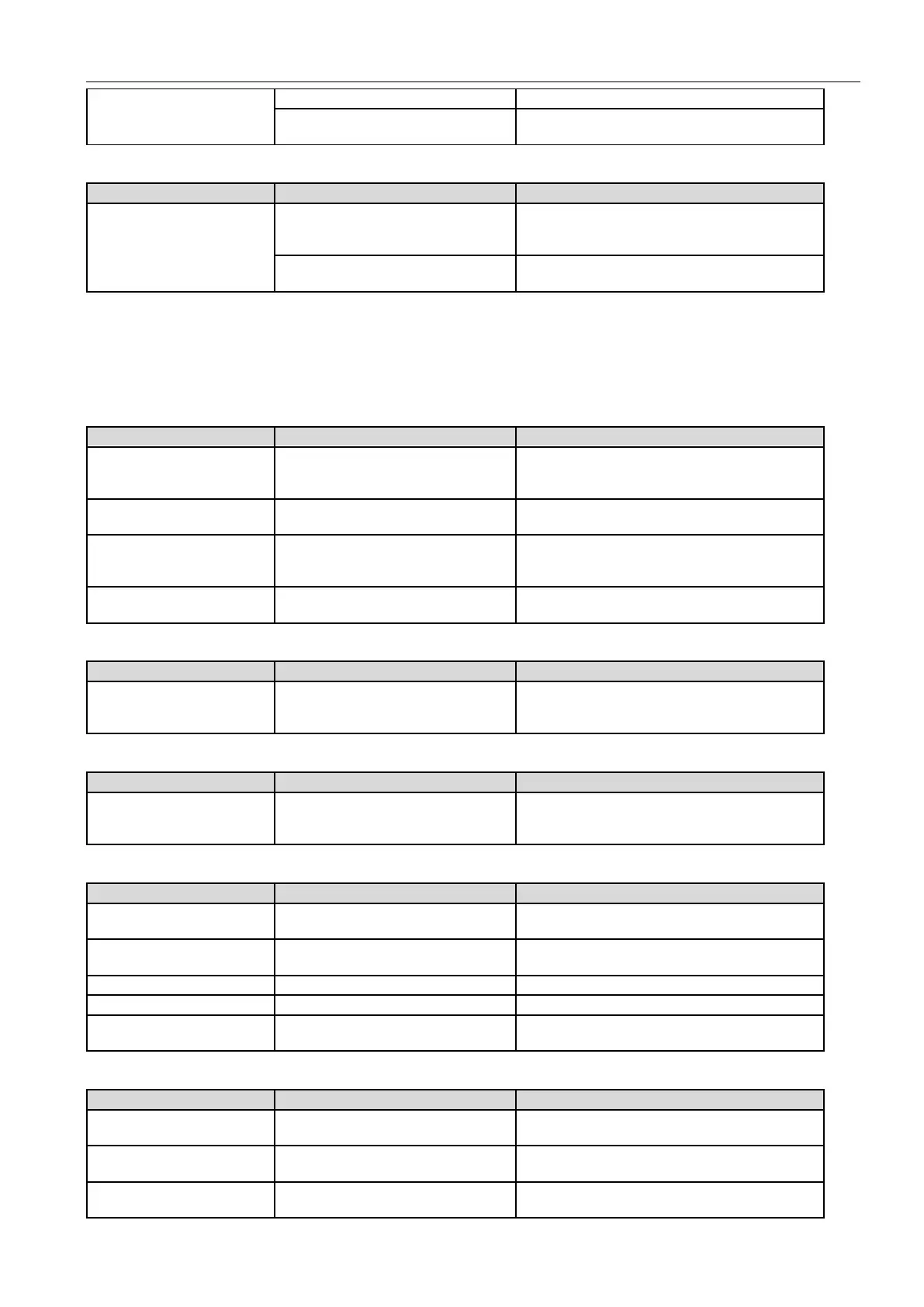
Whether there is serious interference
Use a qualified twisted shielded wire to transmit the
pulse signal
Al 034: Analog zero drift error correction
For zero drift self-learning, the
collected external voltage
exceeds 2V
When performing the autotuning of zero
drift, whether the upper computer
command is set to 0
The commands from the upper computer is set
to 0, and then auto tune the zero drift again.
Upper PC command is 0, the output
voltage exceeds 2V
Modify the upper computer output
Warning diagnosis and handling measures
When the servo drive has a warning, a warning will be displayed "AlE on the numeric keypad. " warning occurance indicates that the
system detects an abnormality, but the motor does not stop running, please check the causes and eliminate the problem of warning.
Warning display and handle measures are as follows:
AlE02: Drive overheating warning
Ambient temperature is too high
Check whether the ambient temperature
and humidity are within the allowable
range
Improve the cooling conditions of the servo drive, and
reduce the ambient temperature
The drive cooling fan is
damaged
Check if the drive cooling fan is running
Replace the fan that does not operate
The installation direction of the
servo drive or the cooling fan
inlet and outlet are blocked
1: Check the drive installation meets the
requirements
2: Check the drive sink is clogged
1: installing a drive in accordance with chapter 2.
2: blockage cleansed
The servo drive is faulty
Power off for a period of time before
restart
If the fault is still reported, replace the servo drive
AlE03: Motor overload warning
motor load reaches at the motor
overload warning threshold set
by P8-09
1: Refer to Al 00D and Al 00E
2: P8-09 parameter setting is too small
1: Refer to Al 00D and Al 00E
2: Appropriate increase in P8-09 set value
AlE04: drive overload warning
drive load reaches at the drive
overload warning threshold set
by P8-08
1: Refer to Al 00D and Al 00E
2: P8-08 parameter setting is too small
1: Refer to Al 00D and Al 00E
2: Appropriate increase in P8-08 setting value
AlE05: Excessive position deviation warning
The position following error
alarm threshold is too small
Confirm whether the parameter of P1-18
is appropriate
Increase the setting value of P1-18
The pulse command frequency
is higher than the specification
Detect the frequency of the pulse
command
Adjust the pulse frequency so that it is not higher than
the specification
The gain value is set too low
Determine if the set value is appropriate
Set the gain value correctly
Confirm the torque limit value
Correctly adjust the torque limit value
Load inertia is too large
Calculate the ratio of load inertia to motor
rotor inertia
Reduce the load inertia or re-evaluate the motor
capacity
AlE06: braking overload warning
Braking resistor is not connected
or the capacity is too small
1: Check the braking resistor is connected
2: calculate the braking resistance value
1: Reconnect braking resistor
2: Use the appropriate braking resistor resistance
Load inertia is too large
Calculate if the total load / rotor inertia
ratio is appropriate
Reduce the load inertia or change the motor with
larger inertia
Incorrect parameter setting
Check brake resistor set value (P8-10) and
capacity parameter (P8-11)
Correctly set P8-10 and P8-11 parameters
 Loading...
Loading...
