EA180 Servo Drive Manual
43
The run time at this failure
Display the elapsed running time of the servo drive. (since ex-factory)
6.3 d2-xx Product Information query parameters
Show the type of servo drive.
2500ppr incremental encoder
17 / 23bit encoder serial communication
17 / 23bit encoder serial communication
2500ppr incremental encoder
17 / 23bit encoder serial communication
*:The EtherCAT bus type drive does not support the 2500ppr encoder.
CPUA software serial number 1
Other parameters in this group are no longer detailed.
6.4 P0-xx Basic control parameters
Parameter function: select the servo system control mode
P0-00=0: speed control mode
The servo drive works in speed control mode, and determines the speed of the motor by means of communication, parameter
setting, analog and multiple preset speed.
The default functions for the DI and DO terminals are automatically changed. See the commands for the P6 group.
P0-00=1: position control mode
The servo drive operates in position control mode where the position of the motor can be determined by external position
pulses, and the internal multi segment position setting, and the motor speed can be adjusted by the pulse frequency.
The default functions for the DI and DO terminals are automatically changed. See the commands for the P6 group.
P0-00=2: torque control mode
The servo drive works in torque control mode, and the output torque of the motor can be determined by communication,
parameter setting and analog.
The default functions for the DI and DO terminals are automatically changed. See the commands for the P6 group.
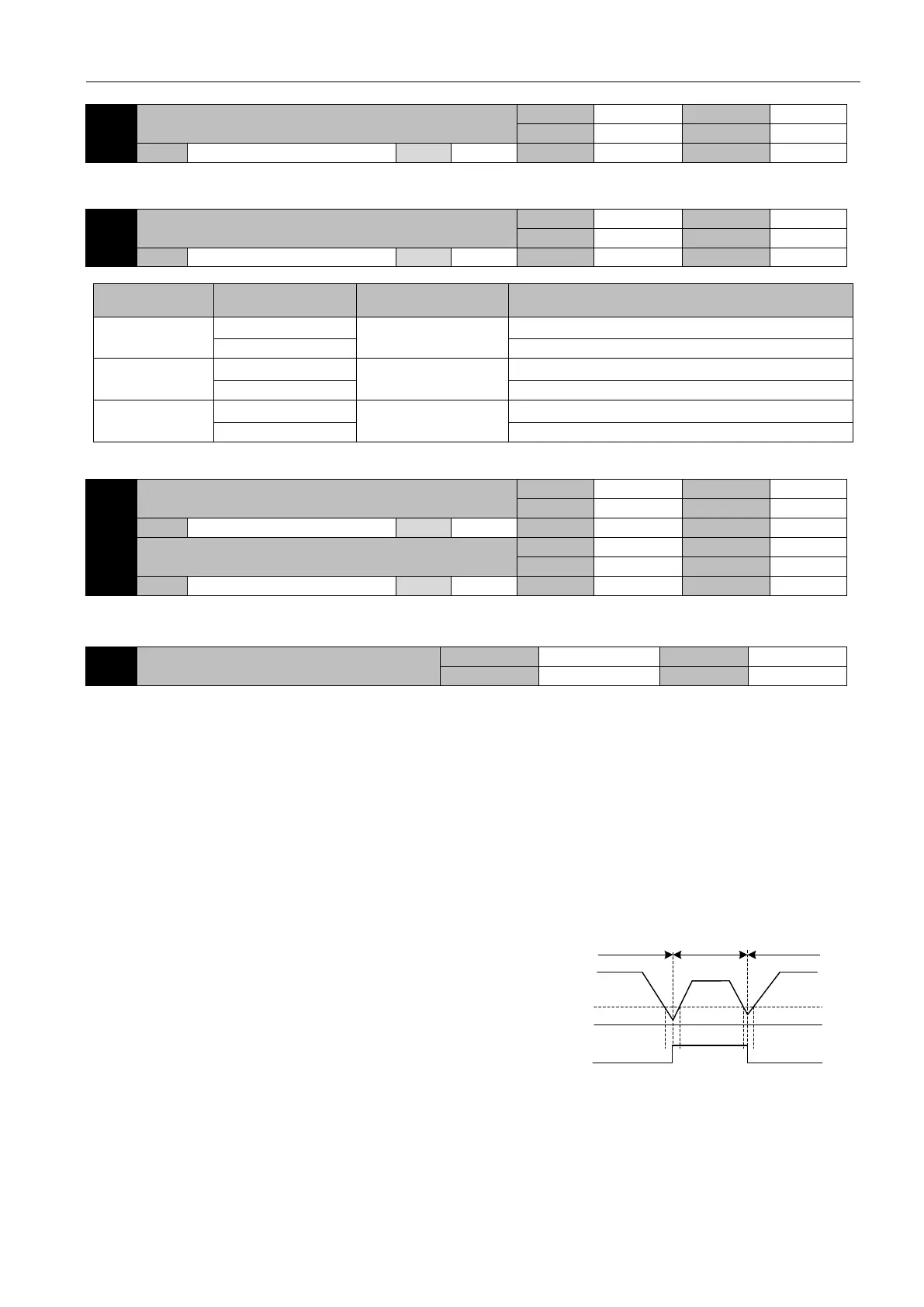
P0-00=3:Speed- position switching mode (zero speed)
The drive works in speed position switching mode and
switches only at zero speed.
Mode switching via DI terminals defined as MSEL
functions.
When the motor is at zero speed, by switching the state
of the MSEL terminal, the drive can switch between two
modes of speed and position.
Switched from a position control mode to speed control
mode, the stranded pulse will be cleared.
Zero speed is the set value of P0-03.
If zero speed condition is not met, even if MSEL signal
ON/OFF switching,is changed for the mode
Control mode switch cannot be carried out even if zero
speed condition is met later on.
When MSEL terminal is not valid, work in speed
control mode.
Speed mode
Position mode
Speed mode
Servo motor speed
Zero speed
Mode
switching(MSEL)
void
0
active
void
 Loading...
Loading...
