EA180 Servo Drive Manual
25
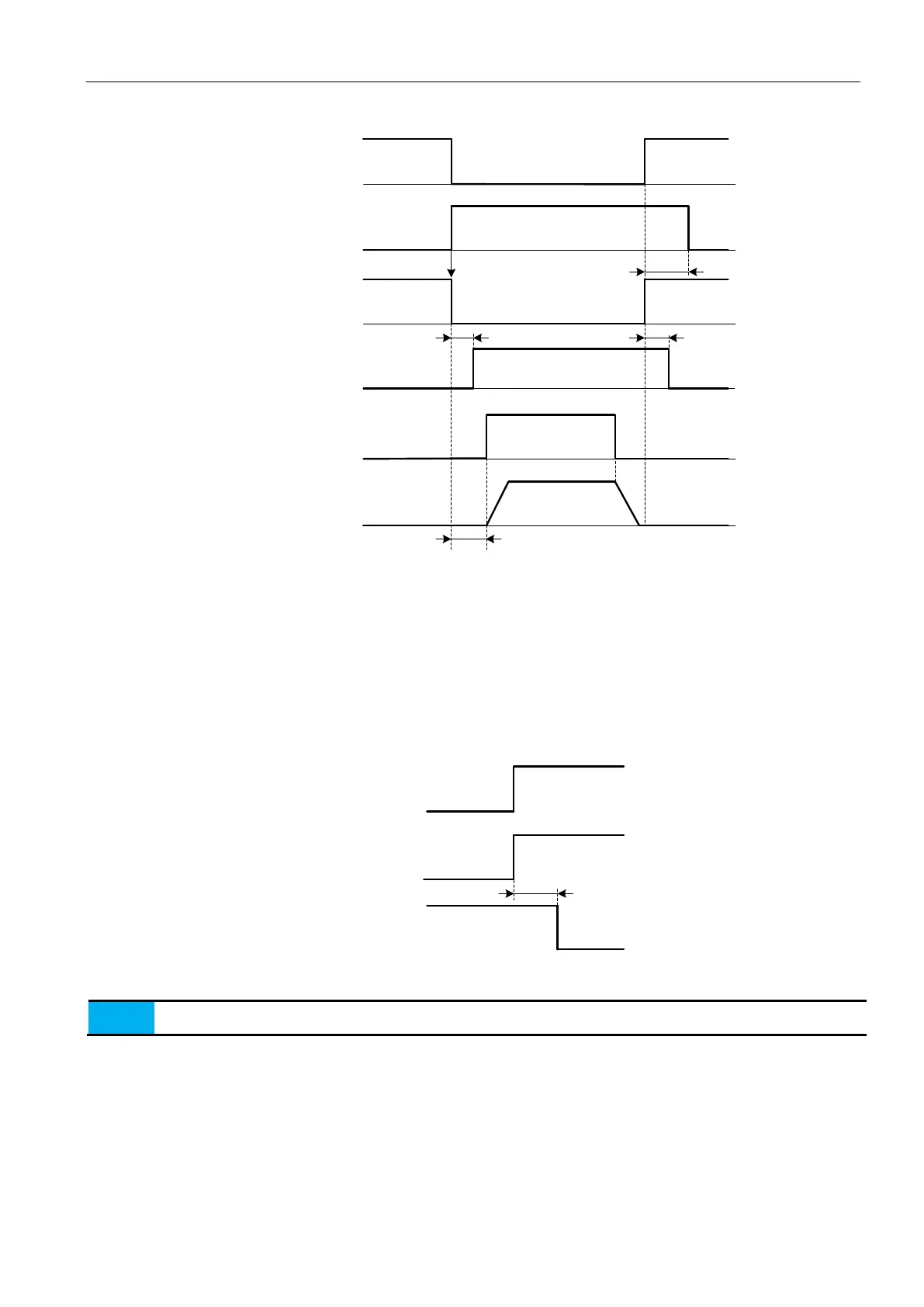
3.7.3 Brake sequence
3.7.3.1 Brake engaged and disengaged delay time refers to following Figure s
Servo enable(/S-ON)
Motor power
Brake command
Position/speed/
torque command
Motor speed
Power
on
Power off
P0-11
P0-16
ON
OFF
OFF
OFF
ON
OFF
Power off
Brake
Disengaged
Engaged
*1 *1
*3
No command
command
0 rpm
*2
Figure 3-21 Brake engaged and disengaged delay time
1. The lag time of the brake is different due to the motor type.
2. P0-16 specifies the time from which the servo drive receives the enable (/S-ON) command, to the point where the position, speed,
torque command can be received. This time must be greater than the time required to disengage the brake. When the upper device
outputs the command to the servo drive, please wait for this time to output after the /S-ON-ON signal.
3. Please set the brake action and servo OFF time by P0-09, P0-10, and P0-11.
3.7.3.2 The braking signal (/BK) output time of the servo motor when it stops.
When applied to a vertical shaft, the dead weight or external force of the mechanical part movement may cause a slight movement of
the machinery. By setting P0-11, the motor is left in the non energized state after the brake is enagaged so as to eliminate the slight
movement of the machine.
Servo enabled
(/S-ON)
Power
Brake command
Motor power ON
P0-11
ON
OFF
Motor power OFF
Disengaged
Engaged
Figure 3-22 Servo enabled-off brake action sequence
In any event when the alarm occurs, P0-11 is not valid, and the servo will immediately enter the non-energized state.
At this point, the mechanical movement may move freely before the brakes act.
3.7.3.3 The output time of the brake signal (/BK) in the rotation of the servo motor
If the servo motor gives alarm or the enable is cancelled forcibly when the motor rotates, the servo motor will immediately enter
the non energized state. At this point, the braking signal (/BK) output time can be adjusted by setting the braking command output speed
value P0-10 and the servo OFF- brake command waiting time P0-09.
Operating conditions of the brake when the servo motor rotates
When any of the following conditions are established, the brake signal will act:
When the motor enters the non energized state, the motor speed is lower than the setting value of P0-10.
When the motor enters the non energized state, it goes through the setting time of P0-09.
 Loading...
Loading...
