EA180 Servo Drive Manual
71
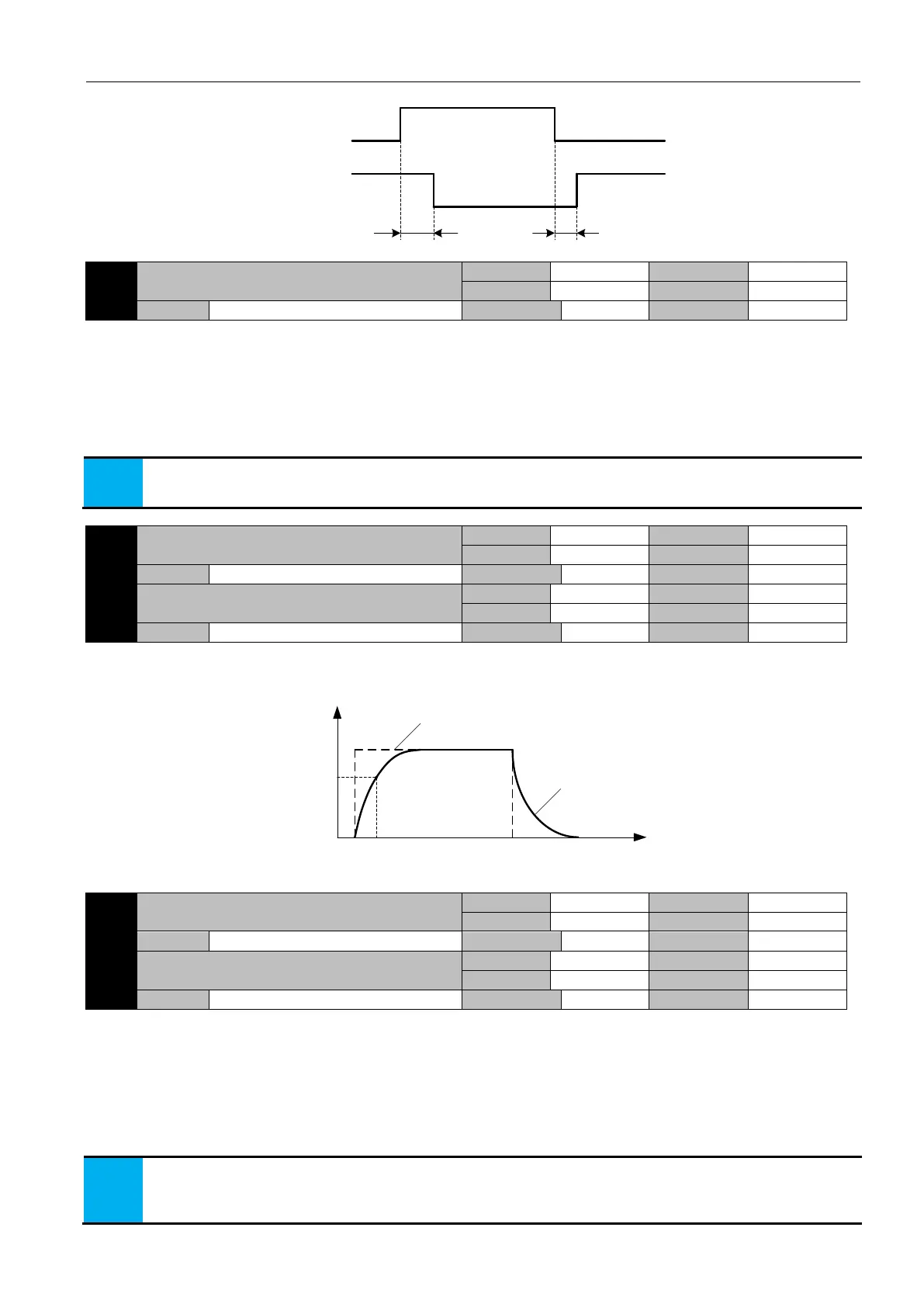
Parameter function: set the effective and invalid delay time for each DO output.
DO
output
Effective
Void
Void
Event
Not
happen
Happen
Not
happen
Not happen
DO void
delay
DO effective
delay
Parameter function:
0: depends on the function state; 1: forcibly valid.
*: at the end of the numer B, this parameter is binary. Please pay attention when communicating.
BitX=1, the output of the DO terminal corresponding to this bit is valid。
1. this function can test whether the connection between the DO output of the drive and the external device is intact
when the servo is not enabled.
2. when the servo power is restarted, the parameter content is automatically cleared.
Parameter function: set the first-order low-pass filter time constant of AI1 and AI2 analog input respectively.
First order low-pass filtering for AI1 and AI2 input analog can reduce the analog fluctuation caused by external electromagnetic
interference and delay the vibration caused by analog mutation. But with too much adjustment, the system will slow down.
AI1
voltage
input
Actual
voltage
After filtering
(Command
voltage)
0
Time
63.2%
P6-25
Parameter function: set the hysteresis level of AI1 and AI2 analog input respectively.
When using analog to regulate speed or torque, even if the analog input remains unchanged, due to electromagnetic
interference and internal sampling circuit, analog actually detected by the drive may fluctuate, therefore cannot obtain the stable
speed or torque. This situation can be improved by tuning this parameter.
Usage method:
When externally given a constant analog signal (non-zero, suggest more than 1V), monitor the value of d0-14 (AI1 channel)
and d0-15 (AI2 channel), if there is not acceptable fluctuation, can increase the value of P6-27 (AI1 channel) and P6-28 (AI2
channel), to make the monitoring value no longer fluctuating.
The greater the hysteresis, it means that the speed or torque command will show greater step, that may not be adjusted
to a specific value of the speed or torque by analog.
For example, when the hysteresis coefficient is 4, it is possible to adjust the speed command to 100RPM or 102rpm,
while the intermediate 101rpm is not available.
 Loading...
Loading...
