131
DEFRNLIT EN
0478 131 9965 A - EN
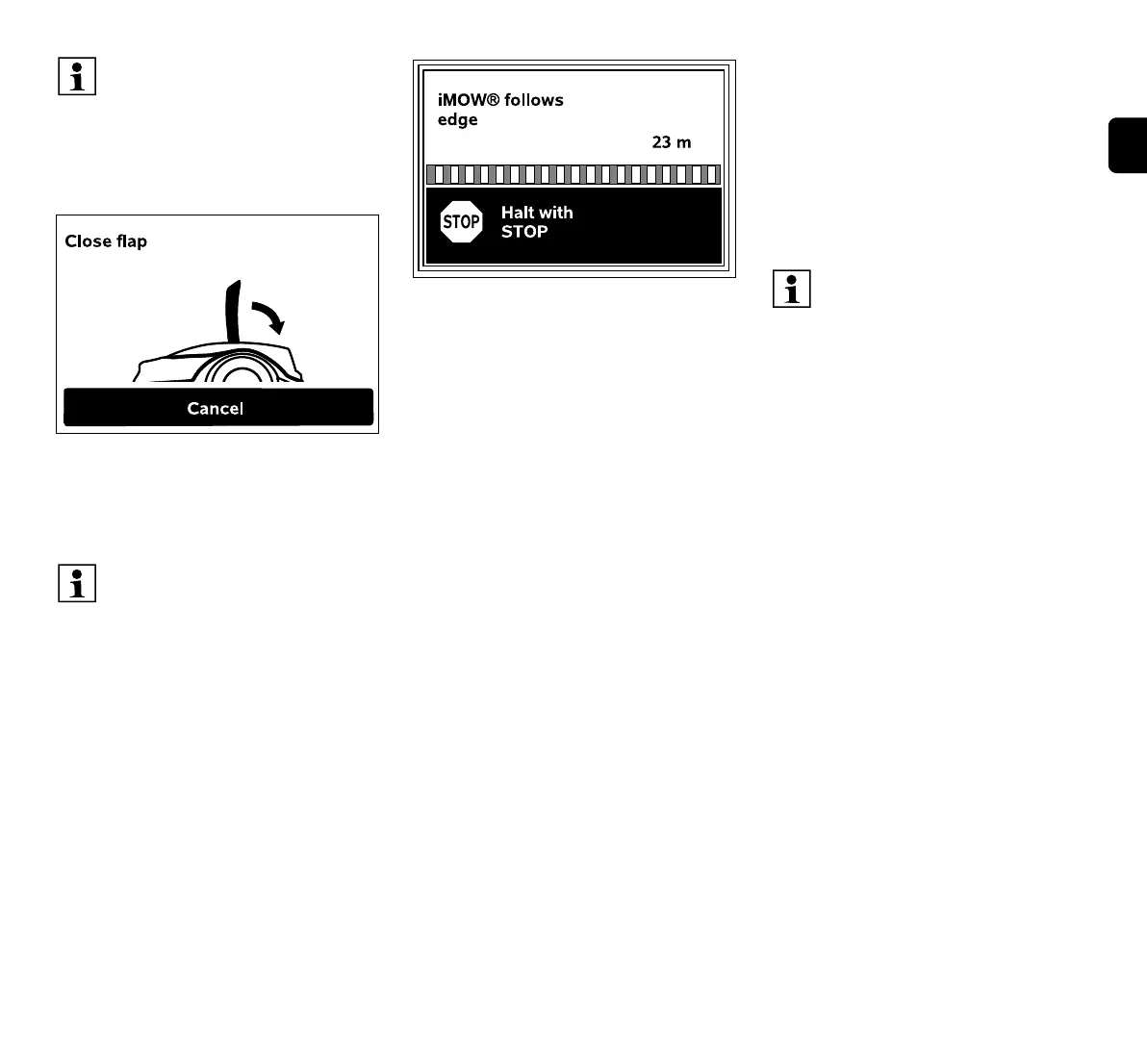
Close the flap of the robotic
mower. (Ö 15.2) Only once the flap has
been closed does the robotic mower start
automatically and follow the edge along
the perimeter wire.
As the robotic mower follows the edge,
walk behind it and ensure
– that the robotic mower follows the edge
of the mowing area as planned,
– that the clearances to obstacles and the
borders of the mowing area are correct,
– that docking in and out takes place
correctly.
The distance covered is shown on the
display – this metric specification is
required for setting starting points at the
edge of the mowing area. (Ö 11.14)
● Read off the displayed value at the
required location and write it down.
Manually set starting points after initial
installation.
The following of edges is automatically
interrupted by obstacles, during operation
on excessively steep slopes or by pressing
the STOP button.
● If edge following has been interrupted
automatically, correct the position of the
perimeter wire and remove any
obstacles.
● Check the position of the robotic mower
before continuing edge following. The
machine must either be located on the
perimeter wire or within the mowing
area with the front facing the perimeter
wire.
Continuation following interruption:
After an interruption, continue edge
following with OK.
The robotic mower docks after one
complete circuit around the mowing area.
The system then queries as to whether a
second circuit in the opposite direction
should be started.
Automatic completion of edge
following:
The next step of the installation assistant is
called up when the robotic mower docks
following the second complete circuit or if
edge following in the opposite direction is
refused.
The robotic mower alternately
follows the edge of the mowing
area in both directions during
running operation after initial
installation. Edge following should
therefore also be checked in both
directions during initial installation.
Edge following is used to define the
home area of the robotic mower.
(Ö 14.5)
If the robotic mower is not receiving
a GPS signal before starting edge
following, the text "Waiting for GPS"
appears on the display. The robotic
mower starts edge following after a
few minutes despite no GPS signal
being received. The "Test edge"
function (Ö 11.13) must be
performed later in order to use GPS
protection, as otherwise no home
area is defined.
It is recommended by STIHL not to
interrupt edge following. Possible
problems when following the edge
of the mowing area or when
docking may not be recognised.
Edge following can be repeated
following initial installation if
necessary. (Ö 11.13)
 Loading...
Loading...











