0478 131 9965 A - NL
318
– Bij kleinere maaivlakken met een
draadlengte van minder dan 80 m moet
het meegeleverde AKM 100 samen met
de begrenzingsdraad worden
geïnstalleerd (Ö 9.9)
– Ledlampjes op het dockingstation
controleren (Ö 13.1)
– Draadbreuk repareren
– Mobiele telefoons of dockingstations in
de buurt uitschakelen
– Positie van het dockingstation
veranderen of storingsbronnen onder
het dockingstation verwijderen
– Begrenzingsdraad met grotere
diameter gebruiken (speciaal
accessoire)
Herhaal het koppelen na het
uitvoeren van de betreffende
maatregel door op de OK-toets te
drukken.
9.12 Installatie testen
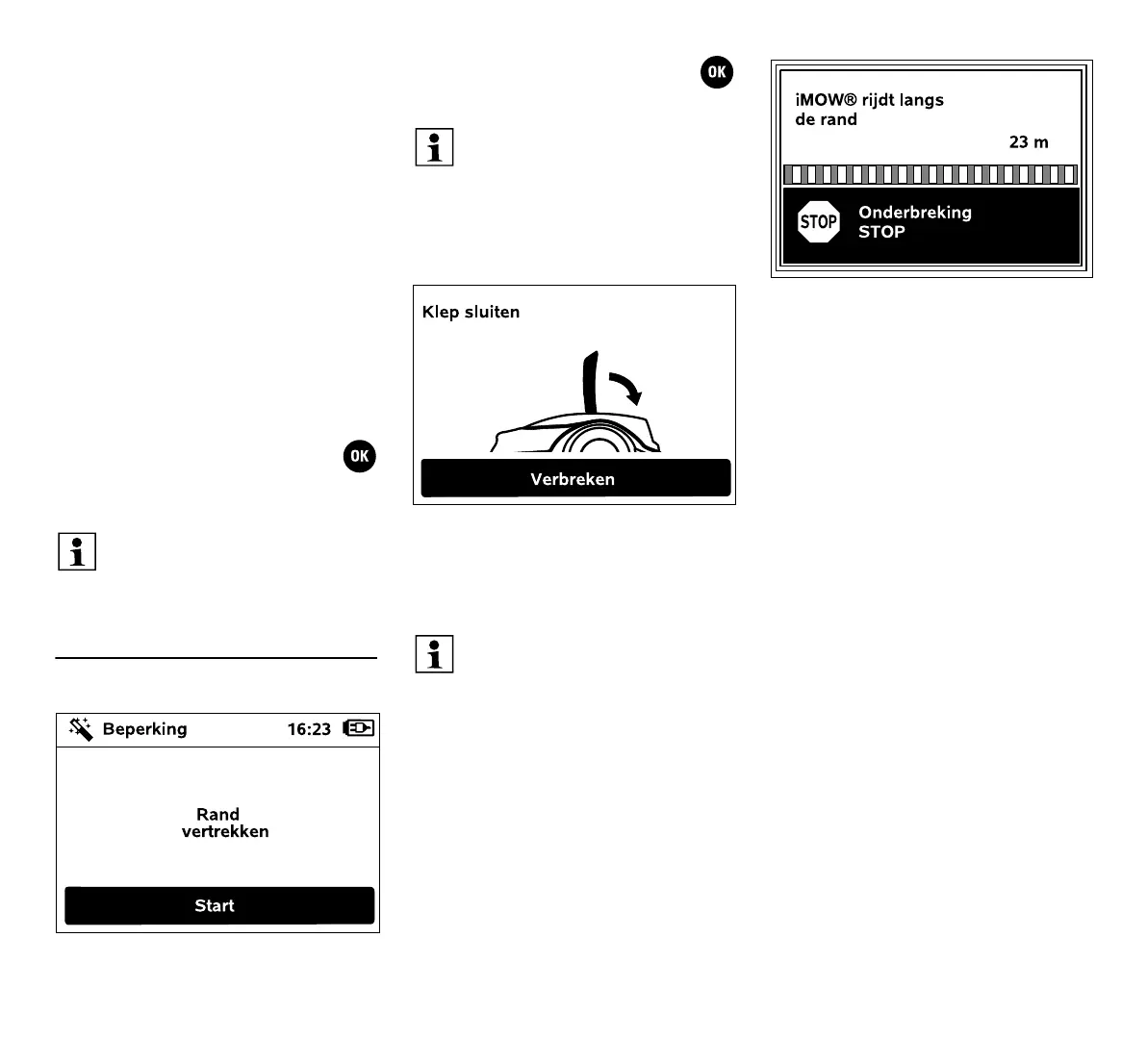
Start de rit langs de rand door de OK-
toets in te drukken – het maaimes
wordt daarbij niet geactiveerd.
Sluit de klep van de robotmaaier. (Ö 15.2)
Pas als de klep gesloten is, start de
robotmaaier zelfstandig en rijdt deze een
ronde om het maaivlak langs de
begrenzingsdraad.
Loop tijdens het afrijden van de rand
achter de robotmaaier aan en let erop,
– dat de robotmaaier de rand van het
maaivlak zoals gepland volgt,
– dat de afstanden tot hindernissen en tot
de grenzen van het maaivlak in orde
zijn,
– dat het uit- en indocken goed werkt.
Op het display wordt de afgelegde afstand
weergegeven – deze meting is nodig voor
het instellen van startpunten aan de rand
van het maaivlak. (Ö 11.14)
● Lees op het gewenste punt de
weergegeven waarde af en noteer
deze. Stel het startpunt na de eerste
installatie handmatig in.
Het afrijden van de rand wordt
automatisch door hindernissen of door het
rijden op te grote hellingen of handmatig
door het indrukken van de STOP-toets
onderbroken.
● Als het rijden langs de rand
automatisch is onderbroken, corrigeer
dan de positie van de
begrenzingsdraad of verwijder de
hindernissen.
Neem contact op met de
vakhandelaar als het draadsignaal
niet goed kan worden ontvangen en
de beschreven maatregelen geen
oplossing bieden.
De robotmaaier rijdt na de eerste
installatie werkend afwisselend in
beide richtingen langs de rand van
het maaivlak. Daarom moet het
afrijden van de rand bij de eerste
installatie ook in beide richtingen
worden gecontroleerd.
Met de rit langs de rand wordt het
beginbereik van de robotmaaier
gedefinieerd. (Ö 14.5)
Als de robotmaaier vóór aanvang
van de rit langs de rand geen GPS-
signaal ontvangt, verschijnt op het
display de tekst "Wacht op GPS".
Als er geen GPS-signaal wordt
ontvangen, begint de robotmaaier
na enkele minuten toch met de rit
langs de rand. Op een later tijdstip
moet dan de functie "Rand testen"
(Ö 11.13) worden uitgevoerd om de
GPS-beveiliging te kunnen
gebruiken, omdat er anders geen
beginbereik is gedefinieerd.
 Loading...
Loading...











