413
DEENFRNL IT
0478 131 9965 A - IT
Mentre il robot tosaerba percorre il bordo,
seguirlo e fare attenzione
– che il robot tosaerba percorra il bordo
della superficie di taglio dell'erba come
programmato,
– che le distanze dagli ostacoli e dai
confini dell'area taglio siano corrette,
– che il collegamento e lo scollegamento
in stazione funzionino correttamente.
Sul display viene visualizzata la distanza
percorsa. Tale indicazione in metri è
necessaria per l'impostazione dei punti di
partenza sul bordo della superficie di
taglio dell'erba. (Ö 11.14)
● Sul punto desiderato rilevare e
annotare il valore visualizzato.
Impostare manualmente il punto di
partenza dopo il completamento
dell'installazione iniziale.
La percorrenza dei bordi viene
automaticamente interrotta da ostacoli
oppure quando l'attrezzo percorre pendii
con una grande inclinazione oppure
premendo manualmente il tasto STOP.
● Se la percorrenza dei bordi viene
interrotta automaticamente, correggere
la posizione del filo perimetrale oppure
rimuovere gli ostacoli.
● Prima di continuare la percorrenza dei
bordi controllare la posizione del robot
tosaerba. L'attrezzo deve rimanere sul
filo perimetrale oppure entro l'area
taglio con il lato anteriore in direzione
del filo perimetrale.
Continuazione dopo l'interruzione:
Dopo un'interruzione, continuare la
percorrenza dei bordi selezionando OK.
Dopo un giro completo attorno all'area
taglio, il robot tosaerba si inserisce nella
docking station. Dopodiché viene richiesto
se deve essere avviato un altro giro
completo in direzione opposta.
Fine automatica della percorrenza dei
bordi:
Una volta avvenuto l'inserimento in
stazione dopo il secondo giro completo
oppure dopo aver rifiutato la percorrenza
dei bordi in direzione opposta viene
richiamato il punto successivo
dell'assistente di installazione.
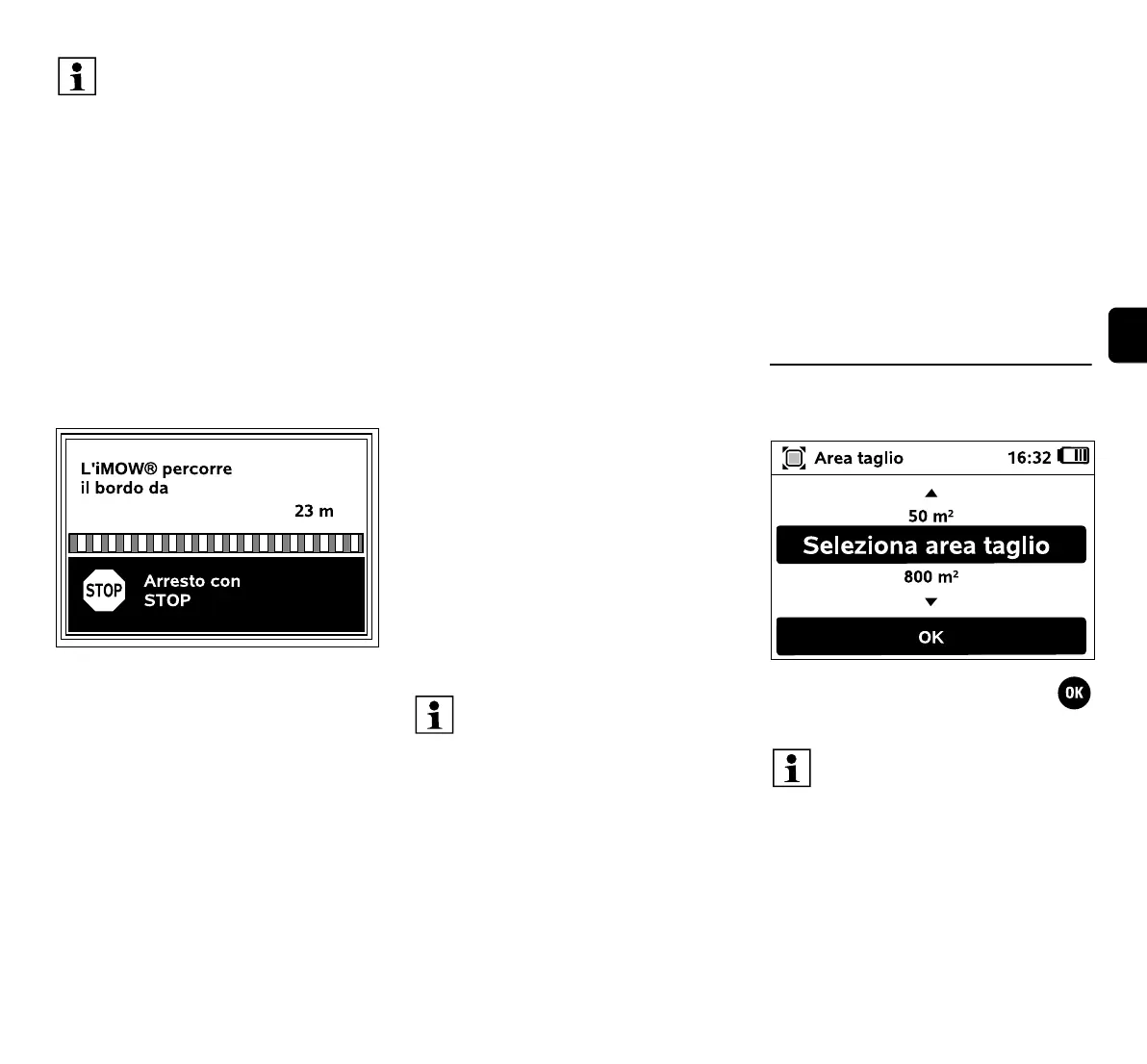
9.13 Programmazione del robot
tosaerba
Immettere la dimensione della
superficie del prato e confermare
con OK.
Con la percorrenza dei bordi viene
definita l'area di ritorno in base
del robot tosaerba. (Ö 14.5)
Se il robot tosaerba non riceve
alcun segnale GPS prima dell'inizio
della percorrenza dei bordi, sul
display viene visualizzato il testo
"Attendi segnale GPS". Se non
riceve alcun segnale GPS, dopo
alcuni minuti il robot tosaerba avvia
comunque la percorrenza dei bordi.
In un secondo momento deve
essere eseguita la funzione "Prova
bordo" (Ö 11.13) per poter
utilizzare la protezione GPS poiché
altrimenti non viene definita l'area di
ritorno in base.
STIHL consiglia di non
interrompere la percorrenza dei
bordi. Potenziali problemi durante
la percorrenza del bordo della
superficie di taglio dell'erba o
durante l'inserimento in stazione
potrebbero non essere rilevati.
Dopo l'installazione iniziale, la
percorrenza dei bordi può essere
eseguita nuovamente, se
necessario. (Ö 11.13)
Le superfici di sbarramento oppure
le superfici secondarie non devono
essere incluse nel calcolo della
dimensione dell'area taglio.
 Loading...
Loading...











