357
DEENFRIT NL
0478 131 9965 A - NL
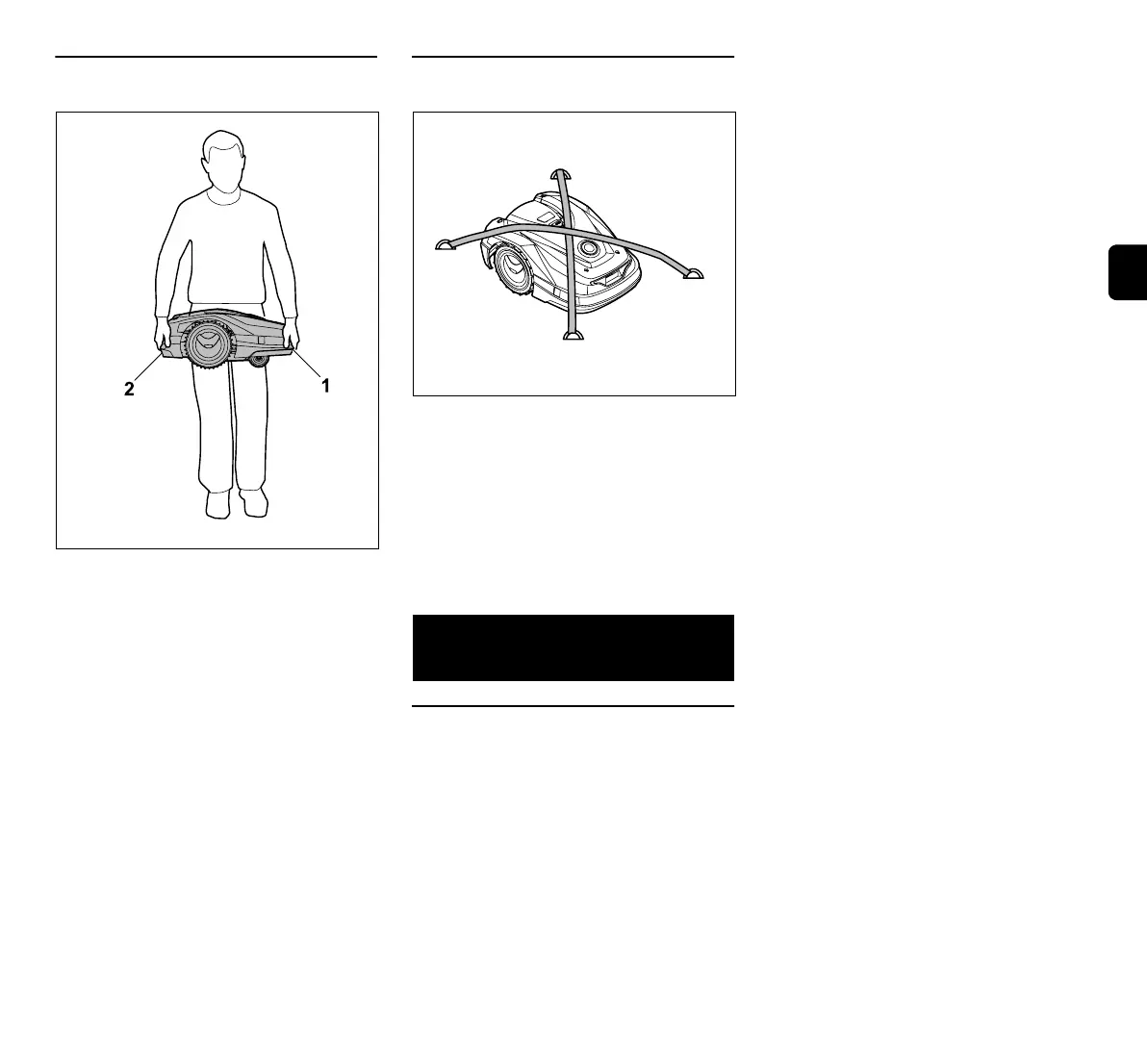
21.1 Apparaat optillen of dragen
Gebruik bij het optillen en dragen de
handgreep voor (1) en achter (2). Zorg
ervoor dat het maaimes altijd van het
lichaam af is gekeerd en houd altijd
voldoende afstand tot het maaimes, met
name wat betreft de voeten en benen.
21.2 Apparaat vastsjorren
Zet de robotmaaier op het laadoppervlak
vast. Zet het apparaat daarvoor zoals
afgebeeld met geschikte
bevestigingsmiddelen (gordels, kabels)
vast.
Beveilig meegetransporteerde
apparaatonderdelen (zoals dockingstation
of kleine onderdelen) ook tegen
verschuiven.
22.1 Elektrische robotmaaier met
accuvoeding (RMI)
met dockingstation (ADO)
Gemaakt door:
STIHL Tirol GmbH
Hans Peter Stihl-Straße 5
6336 Langkampfen
Oostenrijk
ANDREAS STIHL AG & Co. KG verklaart
op eigen verantwoordelijkheid dat
voldoet aan de betreffende bepalingen
van de richtlijnen 2006/42/EC,
2011/65/EU, 2006/66/EC, 2014/53/EU en
overeenkomstig de op de productiedatum
geldende versies van de volgende normen
is ontwikkeld en geproduceerd:
EN 50636-2-107, EN 60335-1 Ed 5, EN
55014-1, EN 55014-2, EN 61000-3-2, EN
61000-3-3
De aangemelde instantie TÜV Rheinland
LGA Products GmbH, nr. 0197, heeft de
conformiteit volgens bijlage III module B
van de richtlijn 2014/53/EU getest en de
volgende EU-typegoedkeuringsverklaring
afgegeven:
RT 60146397 0001
Bewaring van technische documentatie:
Andreas STIHL AG & Co. KG
Productgoedkeuring
22. EU-
conformiteitsverklaring
Type: Grasmaaier,
automatisch en
met accuvoeding
Merk: STIHL
Type: RMI 522.0 C
Serie-identificatie: 6305
Type: Dockingstation
Merk: STIHL
Type: ADO 500
Firmware V 2.00
Serie-identificatie: xxxx
ETSI EN 301 489-1 V 2.2.0 (2017-03)
ETSI EN 301 489-3 V 2.2.1 (2017-03)
ETSI EN 303 447 V 1.1.1 (2017-09)
ETSI EN 301 489-52 V 1.1.0 (2016-11)
ETSI EN 301 511 V 12.5.1 (2018-02)
ETSI EN 303 413 V 1.1.1 (2017-12)

 Loading...
Loading...










