453
DEENFRNL IT
0478 131 9965 A - IT
21.1 Sollevamento o trasporto
dell'attrezzo
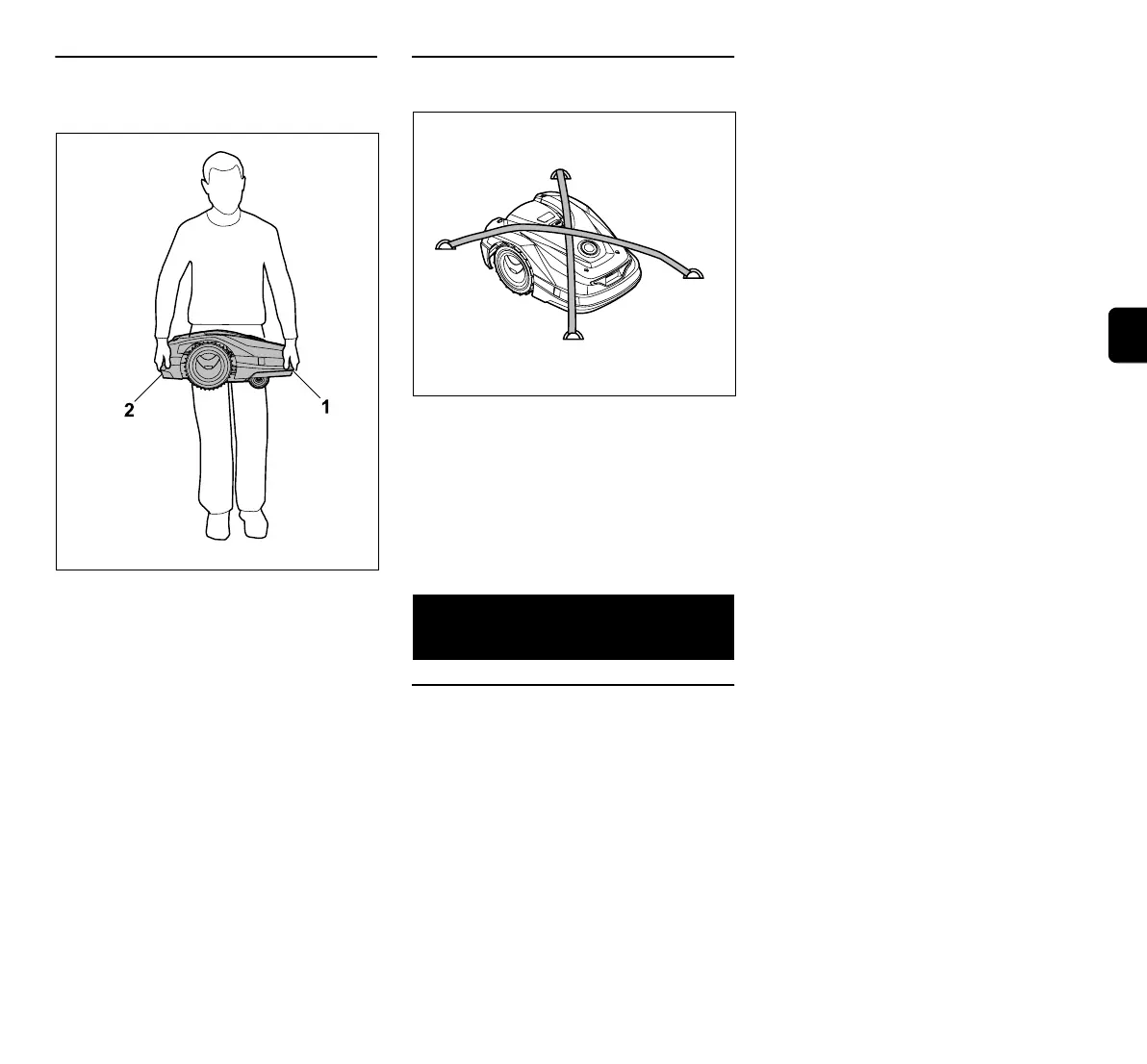
Sollevare e trasportare il robot tosaerba
utilizzando l'impugnatura per il trasporto
anteriore (1) e posteriore (2). Assicurarsi
che la lama sia sempre rivolta in direzione
opposta rispetto al corpo e che la distanza
tra la lama e il corpo, in particolare i piedi e
le gambe, sia adeguata.
21.2 Ancoraggio dell'attrezzo
Fissare il robot tosaerba sulla superficie di
carico. A tale scopo fissare l'attrezzo come
indicato in figura con l'ausilio di appositi
dispositivi di fissaggio (cinghie, corde).
Fissare anche i componenti dell'attrezzo
da trasportare (ad esempio docking
station, piccoli pezzi) per impedirne lo
spostamento.
22.1 Robot tosaerba elettrico
alimentato a batteria (RMI)
con docking station (ADO)
Prodotto da:
STIHL Tirol GmbH
Hans Peter Stihl-Straße 5
6336 Langkampfen
Austria
ANDREAS STIHL AG & Co. KG dichiara
sotto la propria esclusiva responsabilità
che
è conforme alle disposizioni pertinenti
delle direttive 2006/42/EC, 2011/65/EU,
2006/66/EC, 2014/53/EU ed è stato
progettato e fabbricato conformemente
alle versioni delle norme vigenti:
EN 50636-2-107, EN 60335-1 Ed 5, EN
55014-1, EN 55014-2, EN 61000-3-2, EN
61000-3-3
L'organismo notificato TÜV Rheinland
LGA Products GmbH, N. 0197, ha
verificato la conformità ai sensi
dell'allegato III, modulo B della direttiva
2014/53/EU e ha rilasciato l'attestato di
esame EU del tipo:
RT 60146397 0001
22. Dichiarazione di
conformità EU
Tipo di costruzione: Tosaerba, auto-
matico e
alimentato a
batteria
Marchio di fabbrica: STIHL
Modello: RMI 522.0 C
N. di identificazione
serie:
6305
Tipo di costruzione: Docking station
Marchio di fabbrica: STIHL
Modello: ADO 500
Firmware V 2.00
N. di identificazione
serie:
xxxx
ETSI EN 301 489-1 V 2.2.0 (2017-03)
ETSI EN 301 489-3 V 2.2.1 (2017-03)
ETSI EN 303 447 V 1.1.1 (2017-09)
ETSI EN 301 489-52 V 1.1.0 (2016-11)
ETSI EN 301 511 V 12.5.1 (2018-02)
ETSI EN 303 413 V 1.1.1 (2017-12)

 Loading...
Loading...










