Protective Elements
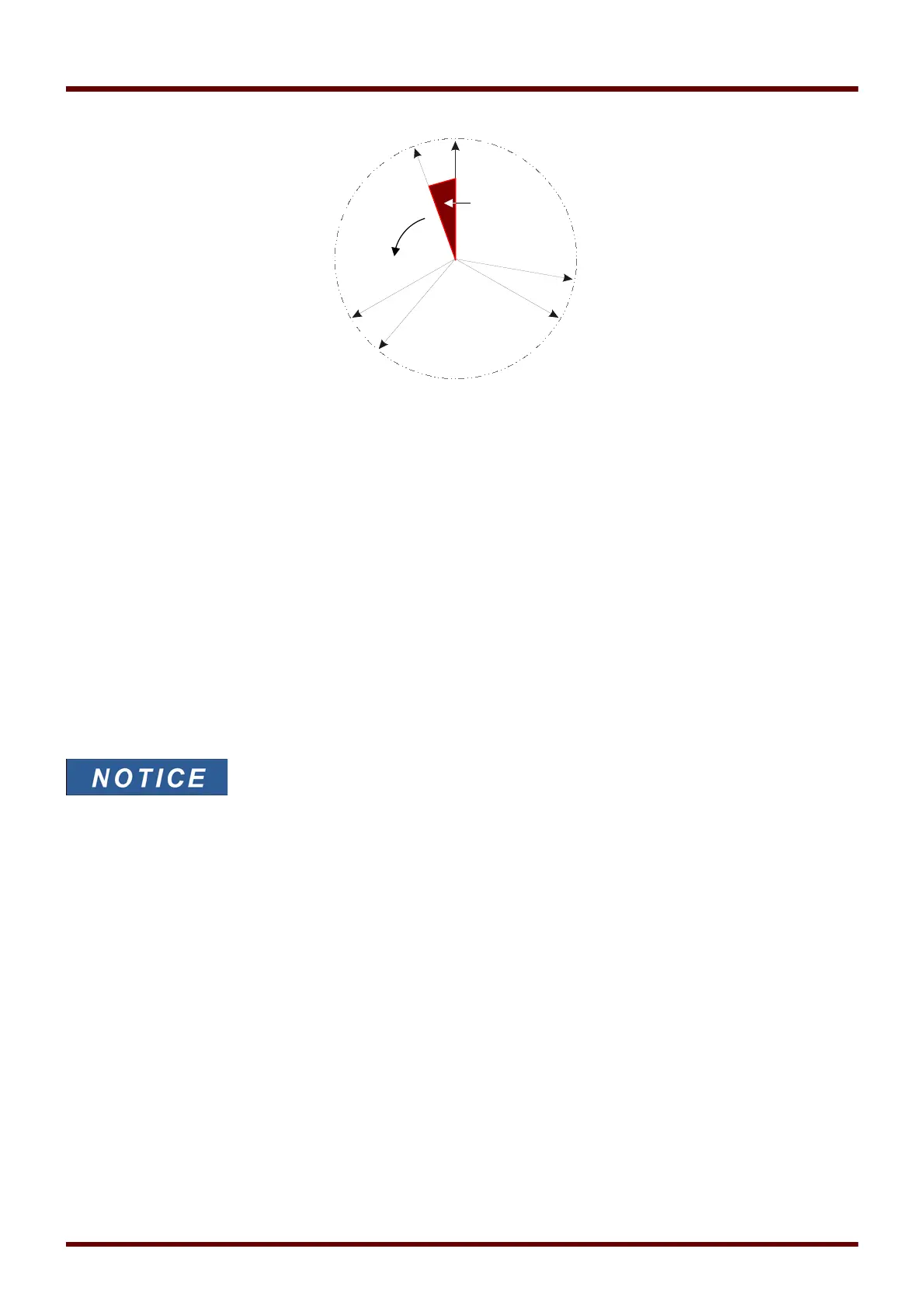
At the instant of synchronization, the angular difference of the two systems should be nearly zero because,
otherwise, unwanted load inrushes occur. Theoretically, the angular difference can be regulated to zero by giving
short pulses to the speed governors. When paralleling generators with the grid, in practice, synchronization is
requested as quick as possible and so usually a slight frequency difference is accepted. In such cases, the angular
difference is not constant but changes with the slip frequency ΔF.
By taking the breaker closing time into consideration, a lead of the closing release impulse can be calculated in a
way that breaker closing takes place at exactly the time when both systems are in angular conformity.
Basically the following applies:
Where large rotating masses are concerned, the frequency difference (slip frequency) of the two systems should
possibly be nearly zero, because of the very high load inrushes at the instant of breaker closing. For smaller rotating
masses, the frequency difference of the systems can be higher.
This sync-check cannot be used for two voltages that are shifted by a fixed angle (e.g
because they are measured on the two sides of a block transformer of a generator).
937 MCDGV4 DOK-HB-MCDGV4-2E