10.3 Main Commands and Subcommands
10.3.1 List of Main Commands and Subcommands
10-14
10.3 Main Commands and Subcommands
This section describes the main commands and subcommands that can be used when connecting Inverters.
10.3.1 List of Main Commands and Subcommands
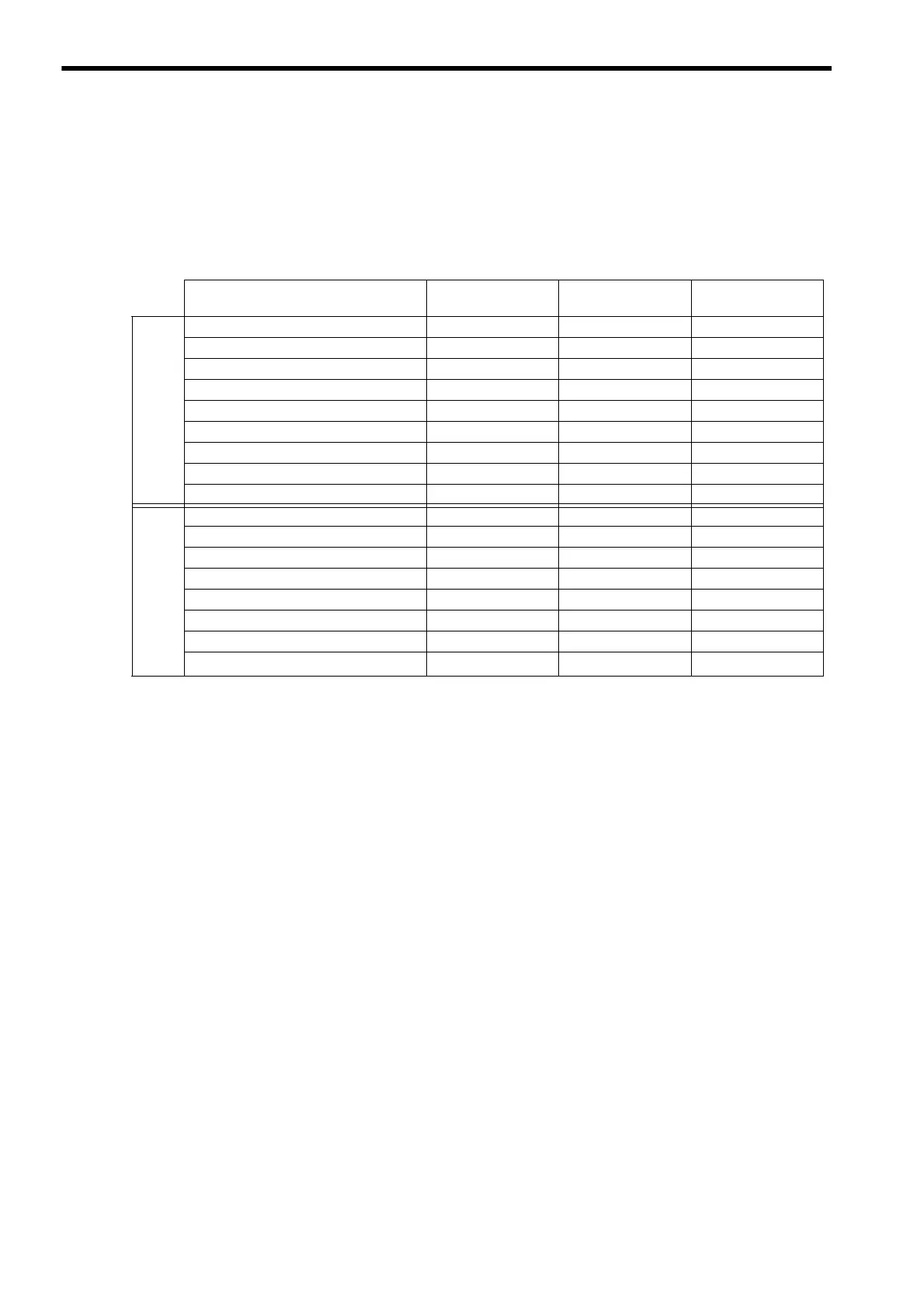
The following table lists the main commands and subcommands that are available for each communication protocol.
* 1. The SVB Module sends a command, but an error response will be returned from the Inverter.
* 2. When a command is selected, the SVB Module will return an error.
* 3. Subcommand to read out a fixed parameter in the SVB Module. This subcommand will not be sent through the
MECHATROLINK transmission line.
Name
MECHATROLINK-II
(32-byte mode)
MECHATROLINK-II
(17-byte mode)
MECHATROLINK-I
Main Commands
(OW08)
00: No Command
Applicable Applicable Applicable
01: Inverter Drive Control
Applicable Applicable Applicable
02: Read User Constant
*1 Applicable Applicable
03: Write User Constant
*1 Applicable Applicable
04: Alarm Monitor
Applicable Applicable Applicable
05: Alarm History Monitor
Applicable Applicable Applicable
06: User Constant RAM Writing
Applicable Applicable Applicable
07: User Constant EEPROM Writing
Applicable Applicable Applicable
08: Transmission Reference
Applicable Applicable Applicable
Subcommands (OW0A)
0: No Command
Applicable Applicable Applicable
01: Inverter I/O Control
Applicable *2 *2
02: Read User Constant
Applicable *2 *2
03: Write User Constant
Applicable *2 *2
04: Alarm Monitor
Applicable *2 *2
05: Alarm History Monitor
Applicable *2 *2
08: Transmission Reference
Applicable *2 *2
09: Read Fixed Parameter
*3
Applicable Applicable Applicable
 Loading...
Loading...









