User Parameter Tables
4-15
4
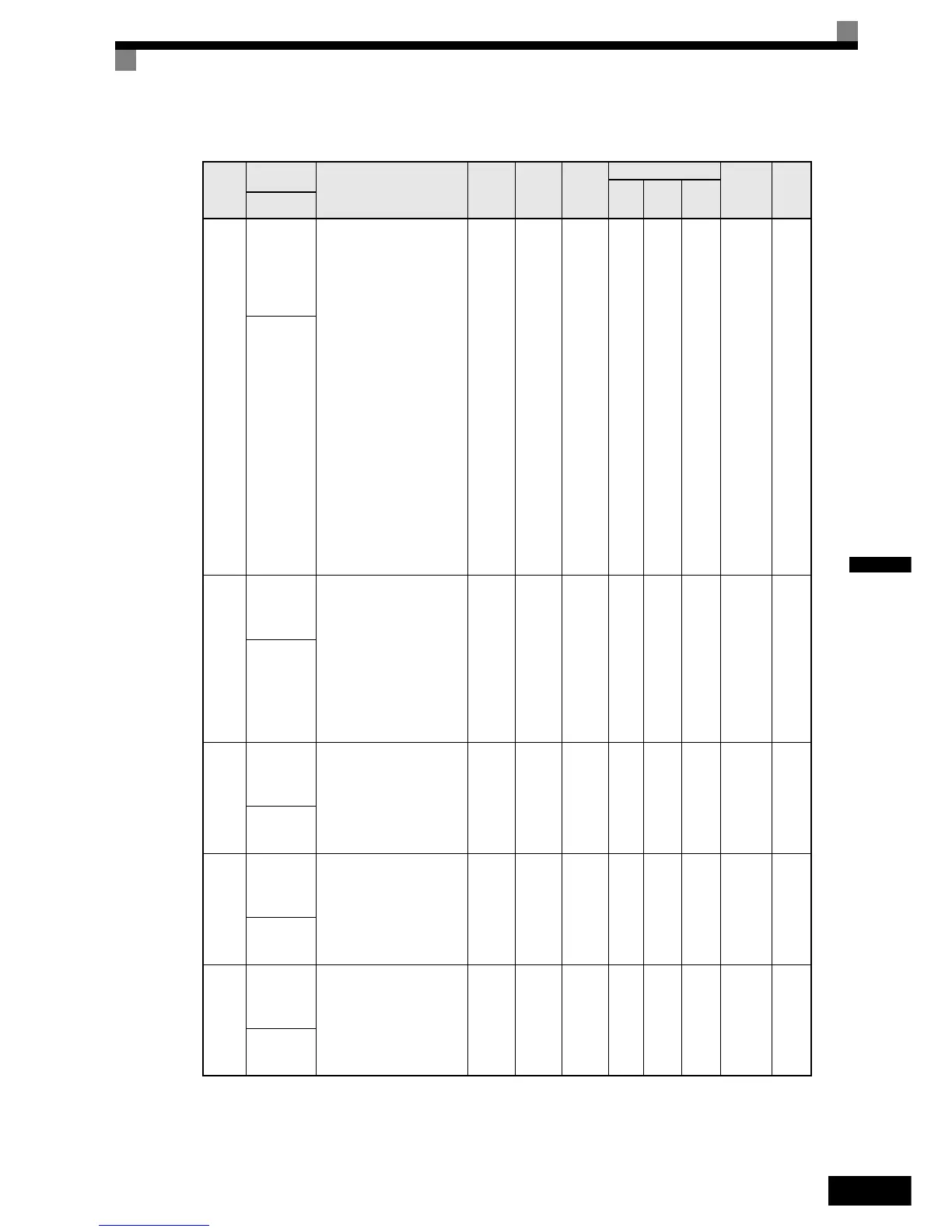
Torque Compensation: C4
* The factory setting will change when the control method is changed. (Open loop vector control factory settings are given.)
Param-
eter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
Control Methods
MEMO-
BUS
Register
Page
V/f
Open
Loop
Vector
Closed
Loop
Vector
Display
C4-01
Torque com-
pensation
gain
Sets the torque compensation
gain.
Usually changing this setting is
not necessary.
Adjust it under the following
circumstances:
• When the cable is long
increase the set value.
• When the motor capacity is
smaller than the Inverter
capacity (Max. applicable
motor capacity), increase
the set values.
• When the motor is oscillat-
ing, decrease the set values.
Adjust the torque compensa-
tion gain so that at minimum
speed the output current does
not exceed the Inverter rated
output current.
Do not alter the torque com-
pensation gain from its default
(1.00) when using Open Loop
Vector control.
0.00 to
2.50
1.00 Yes A A No 215H 5-27
Torq Comp
Gain
C4-02
Torque com-
pensation
delay time
constant
The torque compensation
delay time is set in ms units.
Usually changing this setting is
not necessary.
Adjust it under the following
circumstances:
• When the motor is oscillat-
ing, increase the set values.
• When the responsiveness of
the motor is low, decrease
the set values.
0 to
10000
50 ms
*
No A A No 216H 5-27
Torq Comp
Time
C4-03
Starting
torque com-
pensation
(FWD)
Sets the torque compensation
value at start in FWD direction
0.0 to
200.0%
0.0% No No A No 217H 5-27
FTorqCmp
@ Start
C4-04
Starting
torque com-
pensation
(REV)
Sets the torque compensation
value at start in REV direction
-200.0%
to 0.0
0.0% No No A No 218H 5-27
RTorqCmp
@ Start
C4-05
Starting
torque com-
pensation
time constant
Sets starting torque start-up
time.
When 0 ~ 4 ms is set, it is oper-
ated without filter.
0 to 200 10 ms No No A No 219H 5-27
TorqCmpDe-
layT
http://nicontrols.com