176 Parameters
25.02 Speed proportional
gain
Defines the proportional gain (K
p
) of the speed controller.
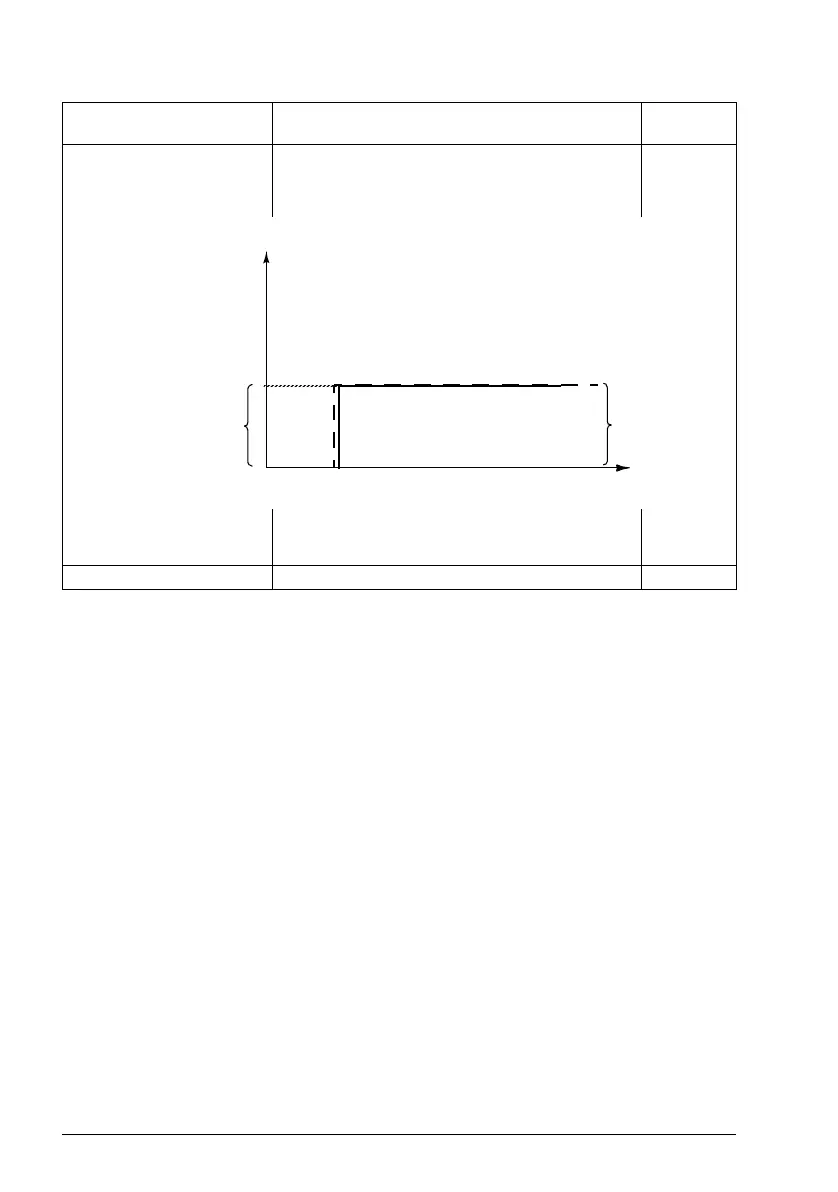
Too high a gain may cause speed oscillation. The figure
below shows the speed controller output after an error
step when the error remains constant.
10.00
If gain is set to 1, a 10% change in error value (reference -
actual value) causes the speed controller output to
change by 10%, ie. the output value is input × gain.
0.00 …250.00 Proportional gain for speed controller. 100 = 1
No. Name/Value Description Default
FbEq 16
Gain = K
p
= 1
T
I
= Integration time = 0
T
D
= Derivation time = 0
%
Controller
output = K
p
×e
Time
e = Error value
Controller output
Error value

 Loading...
Loading...










