56 Program features
Adaptive programming
Conventionally, you can control the operation of the drive by parameters. However,
the standard parameters have a fixed set of choices or a setting range. To further
customize the operation of the drive, an adaptive program can be constructed out of a
set of function blocks.
The Drive composer pro PC tool (version 1.11 or later, available separately) has an
Adaptive programming feature with a graphical user interface for building the custom
program. The function blocks include the usual arithmetic and logical functions, as
well as e.g., selection, comparison and timer blocks.
The physical inputs, drive status information, actual values, constants and
parameters can be used as the input for the program. The output of the program can
be used e.g., as a start signal, external event or reference, or connected to the drive
outputs. See the table below for a listing of the available inputs and outputs.
If you connect the output of the adaptive program to a selection parameter that is a
pointer parameter, the selection parameter will be write-protected.
Example:
If parameter 31.01 External event 1 source is connected to an adaptive
programming block output, the parameter value is shown as Adaptive program on
a control panel or PC-tool. The parameter is write-protected (= the selection
cannot be changed).
The status of the adaptive program is shown by parameter 07.30 Adaptive program
status.
For more information, see the Adaptive programming application guide
(3AXD50000028574 [English]).
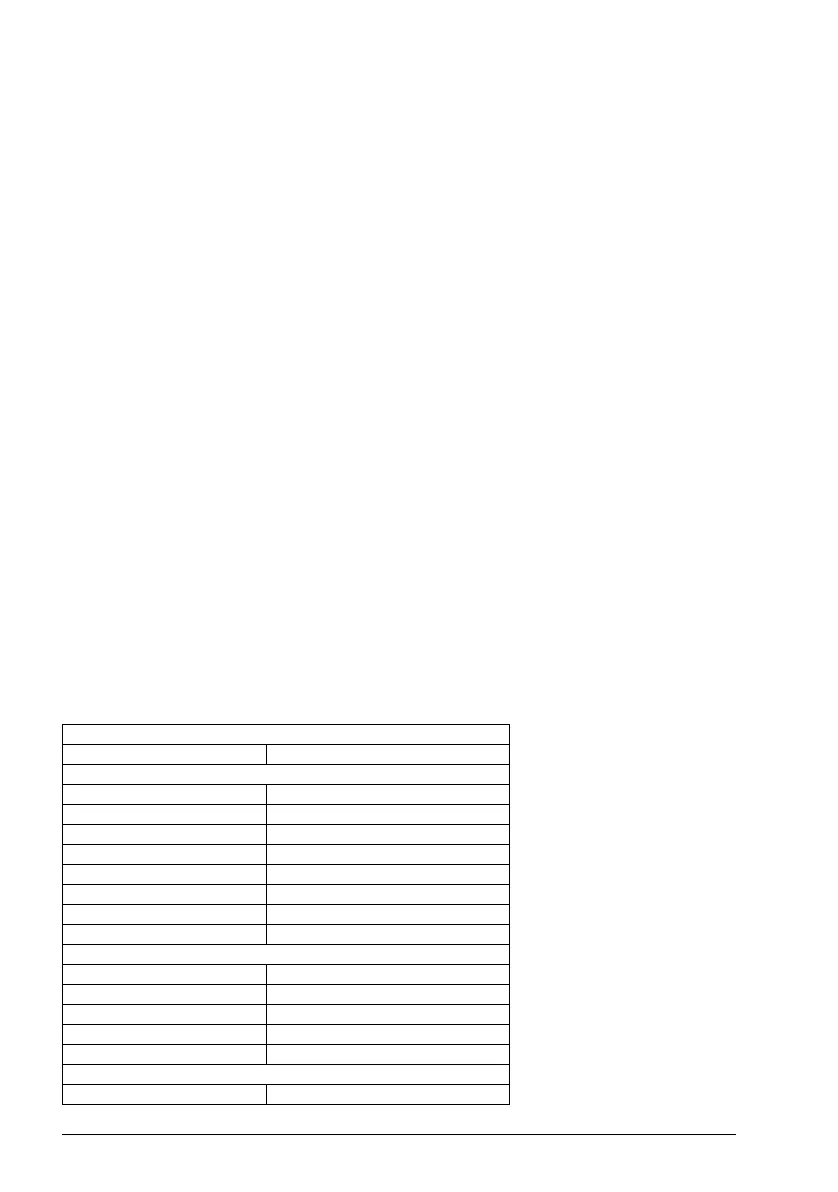
Inputs available to the adaptive program
Input Source
I/O
DI1 10.02 DI delayed status, bit 0
DI2 10.02 DI delayed status, bit 1
DI3 10.02 DI delayed status, bit 2 1)
DI4 10.02 DI delayed status, bit 3 1)
AI1 12.11 AI1 actual value 1)
AI2 12.21 AI2 actual value 1)
DIO1 11. 02 DIO delayed status, bit 0 1)
DIO2 11. 02 DIO delayed status, bit 1 1)
Actual signals
Motor speed 01.01 Motor speed used
Output frequency 01.06 Output frequency
Motor current 01.07 Motor current
Motor torque 01.10 Motor torque
Motor shaft power 01.17 Motor shaft power
Status
Enabled 06.16 Drive status word 1, bit 0

 Loading...
Loading...










