Program features 65
Rush control
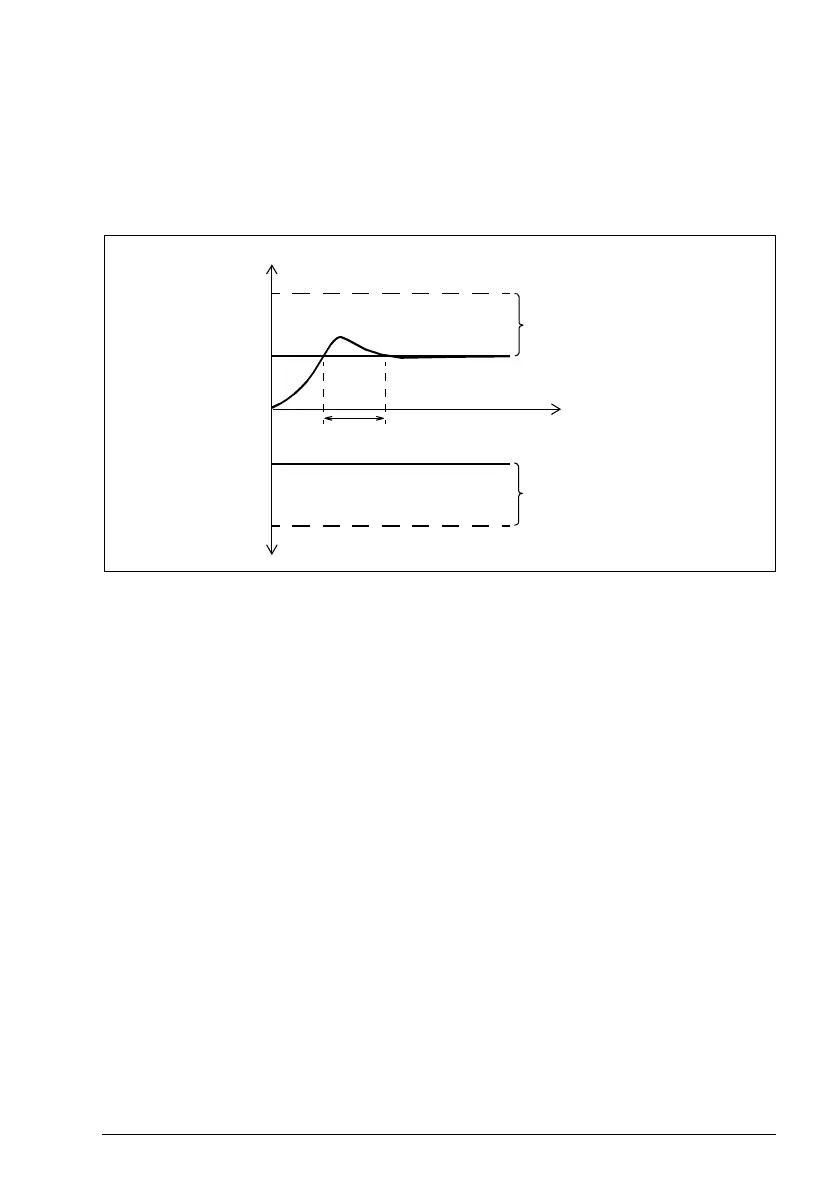
Rush control is automatically on when the operation mode is torque. In torque control,
the motor could potentially rush if the load were suddenly lost. The control program
has a rush control function that decreases the torque reference whenever the motor
speed exceeds the set minimum speed or maximum speed.
The function is based on a PI controller. The program sets the proportional gain to
10.0 and integration time to 2.0 s.
Parameters
Parameters: 30.11 Minimum speed, 30.12 Maximum speed, 31.30 Overspeed trip
margin.
Encoder echo support
The connection of one encoder to several drives with the BTAC-02 encoder interface
module can be done by using a daisy chain wiring scheme. This means wiring
channels A, B, Z and GND of multiple encoder modules together with the encoder.
Parameters
Groups 90 Feedback selection, 91 Encoder adapter settings, 92 Encoder 1
configuration
Jogging
The jogging function enables the use of a momentary switch to briefly rotate the
motor. The jogging function is typically used during servicing or commissioning to
control the machinery locally.
Two jogging functions (1 and 2) are available, each with their own activation sources
and references. The signal sources are selected by parameters 20.26 and 20.27.
Motor speed
Time
Overspeed trip level
Overspeed trip level
31.30 Overspeed trip margin
0
31.30 Overspeed trip margin
30.12
30.11
Rush control active

 Loading...
Loading...










