4 Repair
4.7.2. Replacement gearbox axis 2
3HAC026876-001 Revision: F374
© Copyright 2007-2010 ABB. All rights reserved.
4. Fit two guide pins in two of the
attachment holes, parallel to
each other.
5. Lift the gearbox on to the guide
pins and push it in mounting
position.
6. Refit the gearbox with its
attachment screws.
M12x60 (32 pcs)
Tightening torque: 120 Nm.
7.
CAUTION!
The upper and lower arms
(incl. gearboxes axes 2 and 3)
weighs 455 kg. All lifting
equipment used must be sized
accordingly!
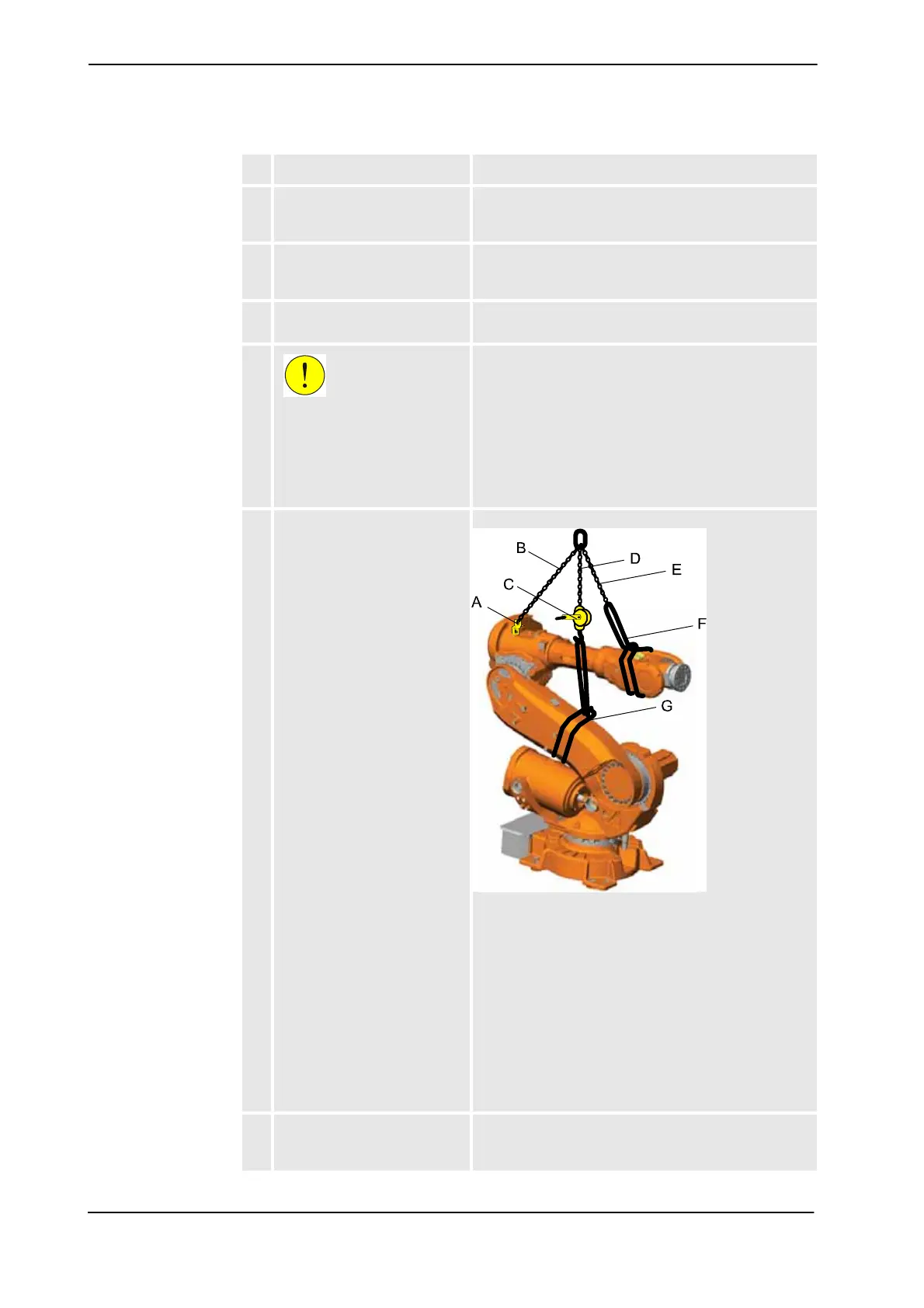
8. Fit the lifting tool on the upper
and lower arms and secure the
robot in an overhead crane.
xx0700000350
Parts:
• A: Lifting eye (on armhouse)
• B: Lifting chain
• C: Hoisting block
• D: Lifting chain
• E: Lifting chain
• F: Roundsling (put in a loop around the wrist on
the inside)
• G: Roundsling (put in a loop around the lower
arm)
9. Use a crank in the gearbox in
order to find the holes for the
attachment screws.
Action Note
Continued
Continues on next page