Description
Allows you to set the angle of the gripper when doing the picking and placing
operation in Z direction.
Note
The angle cannot be out of the physical limits. Or the robot will not work nor-
mally.
GripAngleZ
Configuring the grip location
Use this procedure to configure the item’s grip location.
1 Select the Type as Item and select the required item.
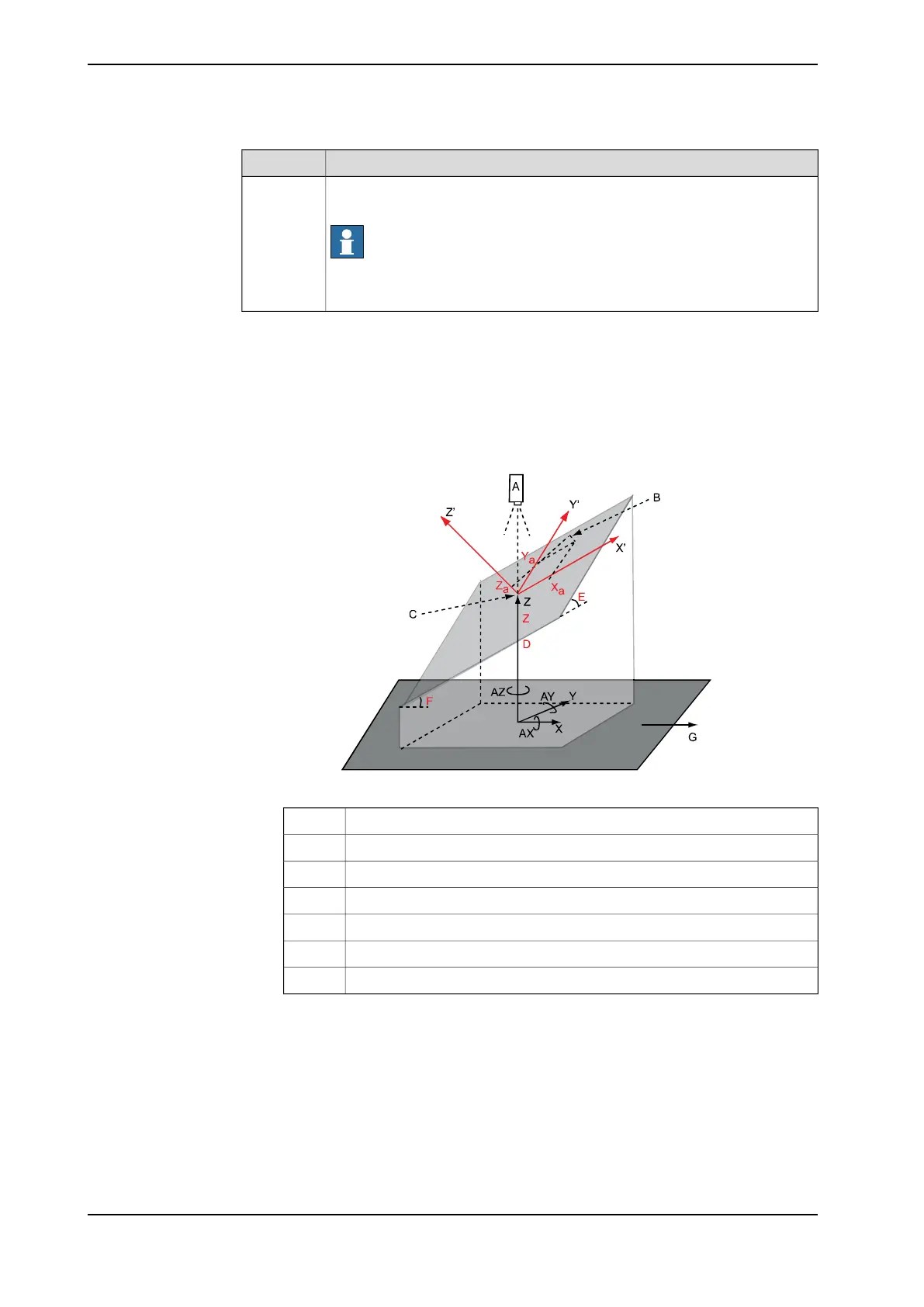
2 Define the positions in millimeters for the grip position of the item specified
in X’, Y’, and Z’ coordinates. The positions are relative to the origin of the
taught model (Vision model grip point). See the following graphic.
xx0900000522
CameraA
Adjusted grip pointB
Vision model grip pointC
Item heightD
Angle XE
Angle YF
Conveyor directionG
3 Define the Euler orientation in degrees for the grip orientation on the item.
A four axes robot (that is IRB 360) can only rotate around the z-axis and
therefore only GripAngleZ can be used.
Six axes robots can pick/place 3D items by defining Euler orientation
GripAngleX, GripAngleY and the item height. The grip orientation has an
orientation in relation to the origin of the taught model (Vision model grip
point). The item height must be specified in the Item configuration dialog,
as a distance from the base frame to the item origin (vision model grip point).
Continues on next page
162 Application manual - PickMaster® Twin - PowerPac
3HAC064218-001 Revision: B
© Copyright 2021 ABB. All rights reserved.
4 Working with PickMaster PowerPac
4.2.12 Simulation
Continued
 Loading...
Loading...





