5.3 Example: Mixing one pick work area and two place work areas
Overview
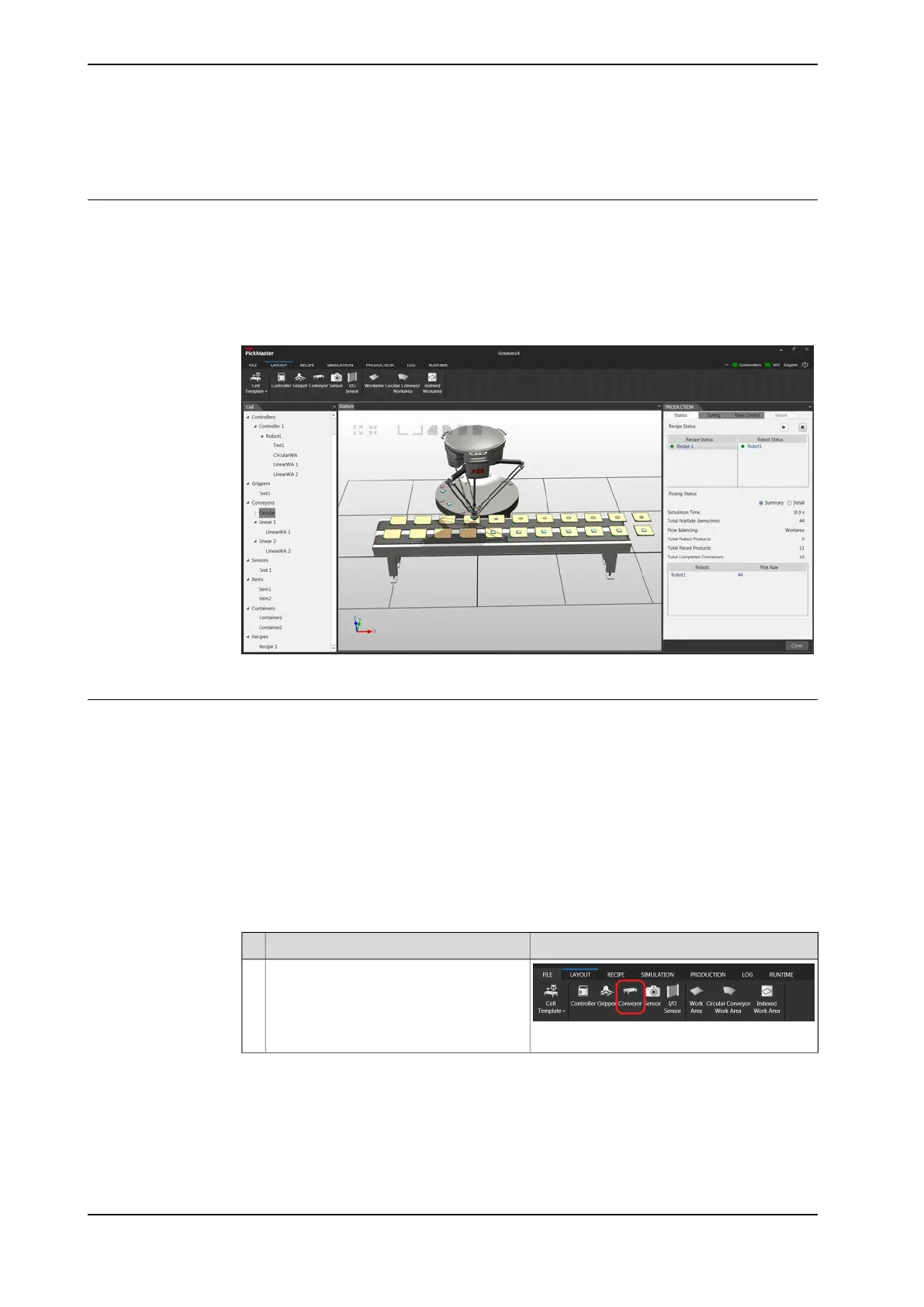
This example describes a solution which contains one robot, two linear conveyors
and one circular conveyor. The robot picks the cylinder items from circular conveyor
and place them into the containers on the first linear conveyor and the box items
from circular conveyor and place them into the containers on the second linear
conveyor separately at the same time.
xx1900000531
Creating the solution
Opening the solution
For detail procedure in opening the solution, see Opening the solution on page 307.
Adding the controller
For detail procedure in adding the controller, see Adding the controller on page 308.
Adding the gripper
For detail procedure in adding the controller, see Adding the gripper on page 309.
Adding the conveyor
Note/IllustrationAction
xx1800000855
On the ribbon-tab, click Conveyor under
Layout.
1
Continues on next page
336 Application manual - PickMaster® Twin - PowerPac
3HAC064218-001 Revision: B
© Copyright 2021 ABB. All rights reserved.
5 Production examples
5.3 Example: Mixing one pick work area and two place work areas
 Loading...
Loading...





