EtherCAT Programming Guide General Operation of Motion Axis
March, 2017 8-15
8
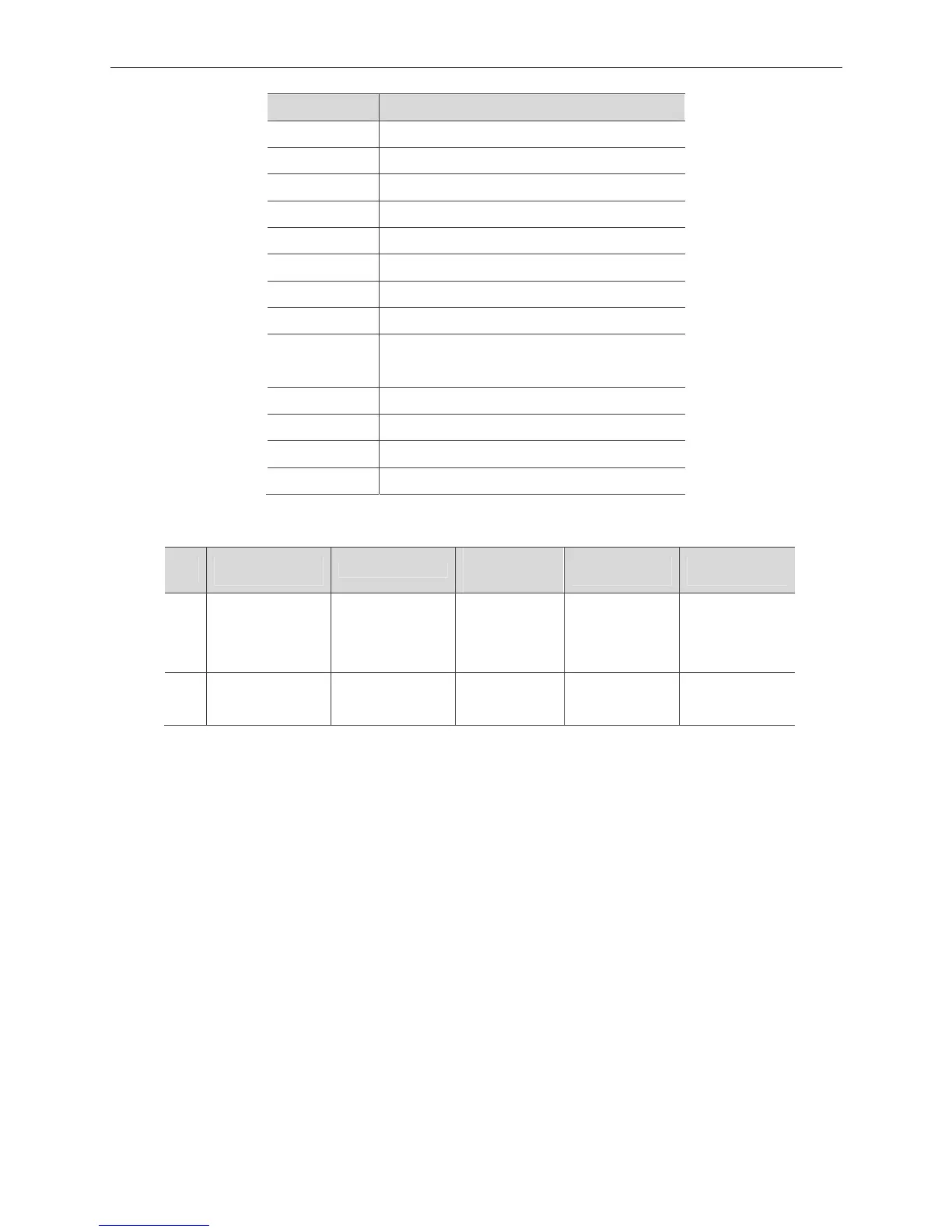
Bit Name
3 Fault (Servo error occurs; motor disabled)
4 Voltage Enabled (Servo on)
5 Quick Stop
6 Switch On Disabled
7 Warning
8 N/A
9 Remote
10 Target Reached (Target-reached signal)
11
Internal Limit Active (internal software limit; not
supported)
12 Operation Mode Specific (Operation mode)
13 Operation Mode Specific (Operation mode)
14 N/A
15 N/A
Operation Mode Specific represents by bit 12 ~ 13 are as follows. See the table below:
Bit
Profile Position
(PP) mode
Homing mode
Position
Interpolation
mode
Profile Velocity
(PV) mode
Profile Torque
(PT) mode
12
New position
command
available
Executing homing
Executing
position
interpolation
Velocity is 0 N/A
13
Position following
overrange
Homing error
occurs
N/A N/A N/A
Table 8.3.3 Definition of Operation Mode Specific