Description
CANopen defines two Touch Probe functions in OD-60B8. However, the applying method varies
with the applied servo drive. Please check the user manual in advance.
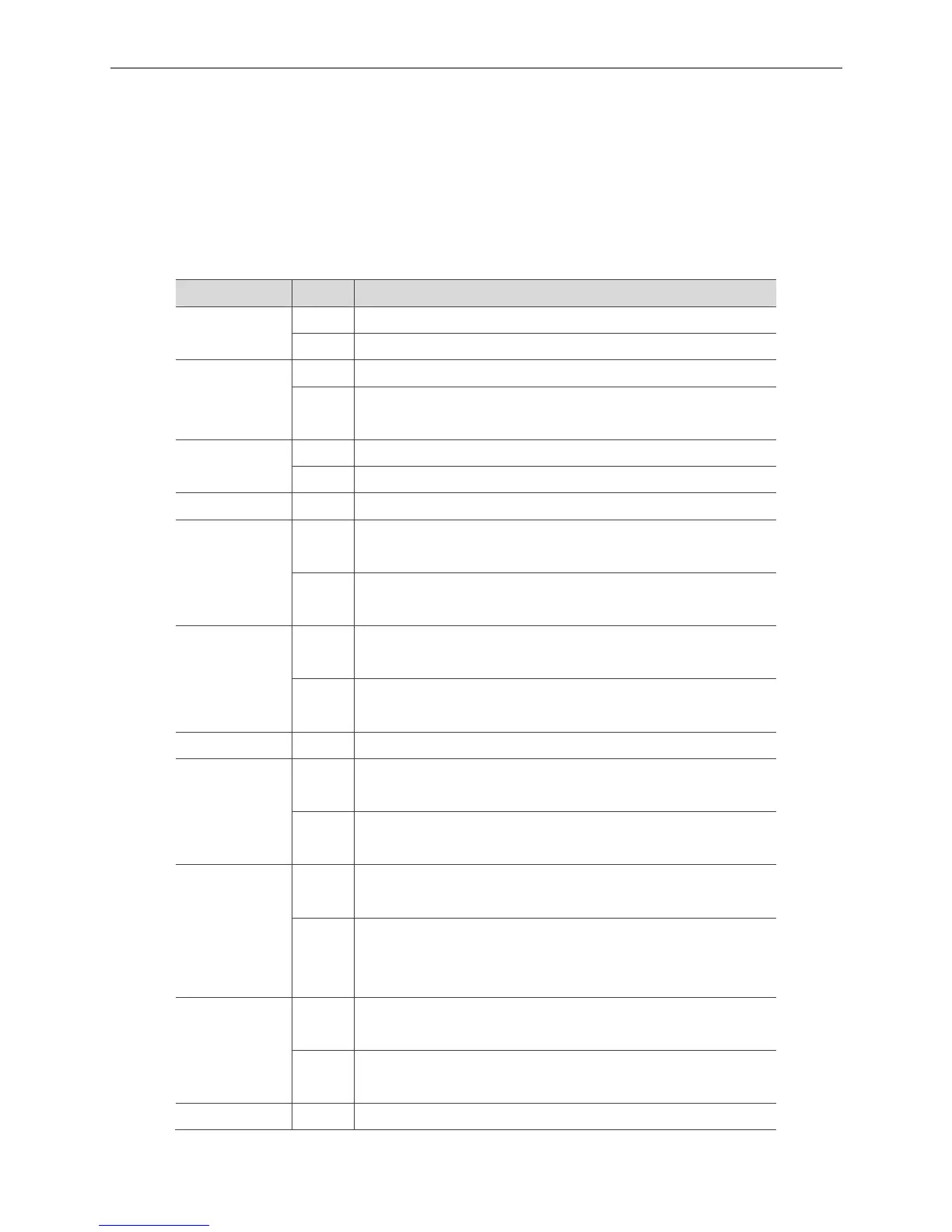
The following table illustrates the Touch Probe function and settings which defined in OD-60B8
by Delta ASDA A2-E and EtherCAT remote pulse module. Please note that this API does not
support the second touch probe function (Touch Probe 2.)
Bit Value Description
0
0 Disable Touch Probe 1
1 Enable Touch Probe 1
1
0 Record the pulse (position) when signal is triggered for the first time
1
Continuous recording; as long as the signals is triggered, the pulse
(position) will be recorded
2
0 Regard the digital input as the trigger signal of Touch Probe 1
1 Regard the motor’s Z pulse as the trigger signal of Touch Probe 1
3 0 Reserved
4
0
Stop capturing the pulse (position) when the trigger signal for Touch
Probe 1 is rising-edge triggered.
1
Start capturing the pulse (position) when the trigger signal for Touch
Probe 1 is rising-edge triggered.
5
0
Stop capturing the pulse (position) when the trigger signal for Touch
Probe 1 is falling-edge triggered.
1
Start capturing the pulse (position) when the trigger signal for Touch
Probe 1 is falling-edge triggered.
6 ~ 7 0 Reserved
8
0
Disable touch probe 2
(This API does not support Touch Probe function 2.)
1
Enable touch probe 2
(This API does not support Touch Probe function 2.)
9
0
Record the pulse (position) when signal is triggered for the first time
(This API does not support Touch Probe function 2.)
1
Continuous recording; as long as the signals is triggered, the pulse
(position) will be recorded
(This API does not support Touch Probe function 2.)
10
0
Regard the digital input as the trigger signal of Touch Probe 2
(This API does not support Touch Probe function 2.)
1
Regard the motor’s Z pulse as the trigger signal of Touch Probe 2
(This API does not support Touch Probe function 2.)
11 0 Reserved