EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017 9-3
9
CSP (Cyclic Synchronous Position) mode uses PDO communication to issue position
commands. EtherCAT master will calculate the position commands for the next communication
cycle after analyzing the moving distance, speed and acceleration of the API. Then, it sends the
new command to all motion axes in each communication cycle to achieve single-axis motion or
multi-axis interpolation.
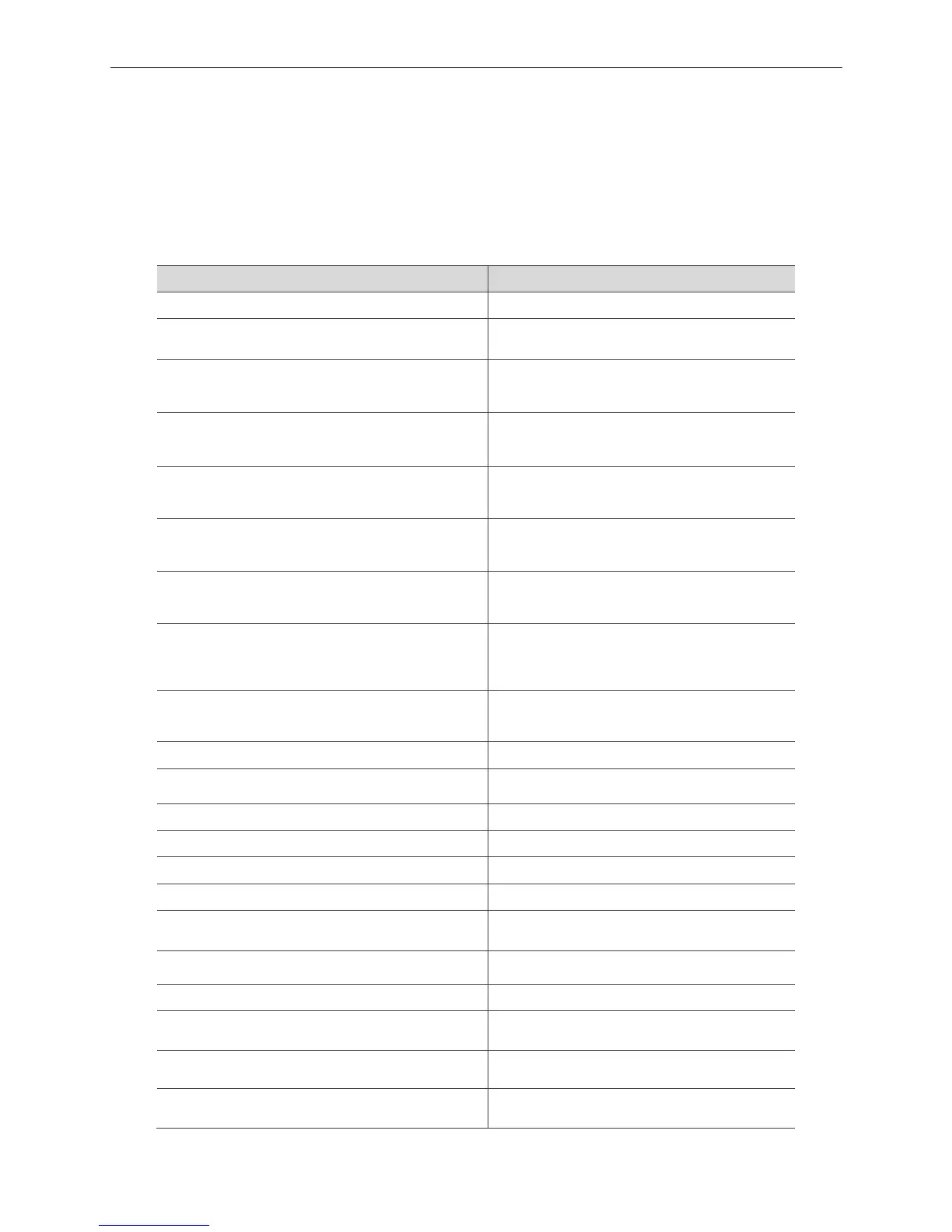
API list of cyclic synchronous position mode (CSP)
Function name Description
_ECAT_Slave_CSP_Start_Move
Execute linear interpolation of single axis
_ECAT_Slave_CSP_Start_V_Move
Execute the single-axis motion with constant
speed
_ECAT_Slave_CSP_Start_Arc_Move
Execute two-axis arc motion, moving from current
position and the specified circle center to form the
specified arc’s angle
_ECAT_Slave_CSP_Start_Arc2_Move
Execute two-axis arc motion, moving from current
position and the specified circle center to form the
specified arc’s angle
_ECAT_Slave_CSP_Start_Arc3_Move
Execute two-axis arc motion, moving from the
current position and specified circle center to the
specified end point
_ECAT_Slave_CSP_Start_Spiral_Move
Execute two-axis spiral motion, moving from
current position and the specified circle center to
form the specified angle
_ECAT_Slave_CSP_Start_Spiral2_Move
Execute two-axis spiral motion, moving from
current position and the specified circle center to
the end point with the specified cycle number.
_ECAT_Slave_CSP_Start_Sphere_Move
Execute three-axis sphere motion and moving
from current position and the known circle center
to the target position with three-dimensional
vector
_ECAT_Slave_CSP_Start_Heli_Move
Set three-axis helical motion, moving from current
position and the known circle center to the
specified height in Z-axis direction
_ECAT_Slave_CSP_Start_Multiaxes_Move
Execute multi-axis linear motion
_ECAT_Slave_CSP_Start_Msbrline_Move
Execute multi-axis point to point motion with
smooth speed
_ECAT_Slave_CSP_Set_Gear
Set the E-gear ratio
_ECAT_Slave_CSP_Set_Softlimit
Set the software limit
_ECAT_Slave_CSP_TargetPos_Change
Set a new target position
_ECAT_Slave_CSP_Velocity_Change
Set a new target speed
_ECAT_Slave_CSP_Feedrate_Overwrite
For the advanced setting of speed change for
single axis
_ECAT_Slave_CSP_Speed_Continue_Enable Enable or disable the continuous speed function
_ECAT_Slave_CSP_Speed_Continue_Set_Mode Set the continuous speed mode
_ECAT_Slave_CSP_Speed_Continue_Set_Combine
_Ratio
Set the percentage of for starting blending speed
of two commands.
_ECAT_Slave_CSP_Scurve_Rate
Set the ratio of S-curve and T-curve during
acceleration and deceleration
_ECAT_Slave_CSP_Liner_Speed_Master
Set the speed (vector) of advanced interpolation
function.