EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017
9-9
9
Description
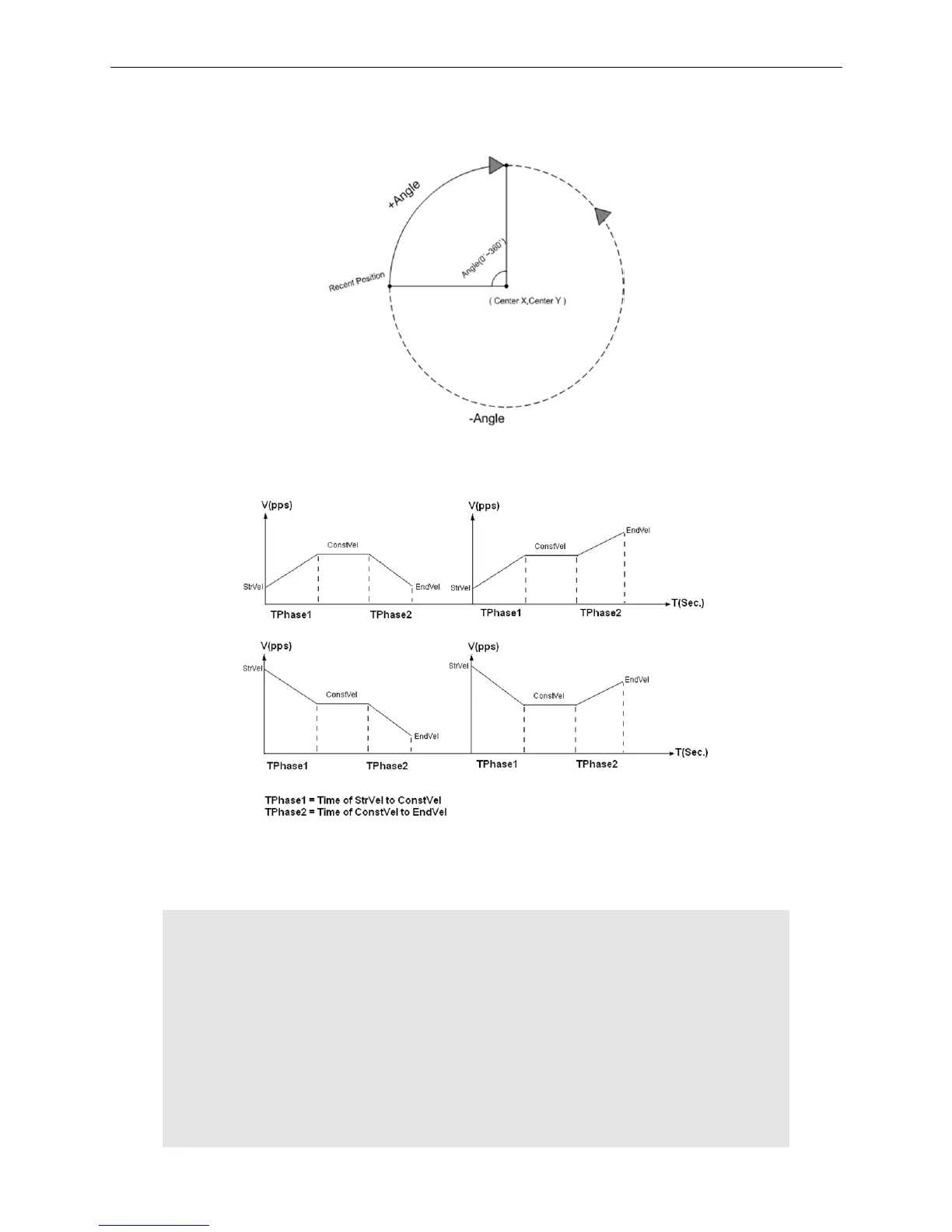
The specified angle of the arc can be over 360 degrees.
Figure 9.3.1 The axis forms a specified angle from the current position and the given circle center
Figure 9.3.2 Description of TPhase1 and TPhase2 (acc/deceleration)
Example
U16 Status;
U16 CardNo=0, AxisNoArray[2]={1,2}, SlotID[2]={0, 0};
I32 CenterPoint[2] ={50000,50000};
F64 Angle=180, TPhase1=0.2, TPhase2=0.1;
I32 StrVel=0, ConstVel =50000, EndVel=20000;
U16 Scurve =0, Abs_Rel =0;
Status = _ECAT_Slave_CSP_Start_Arc_Move (CardNo, AxisNoArray, SlotID, CenterPoint,
Angle,Strvel, ConstVel, EndVel, TPhase1, TPhase2, Scurve, Abs_Rel);