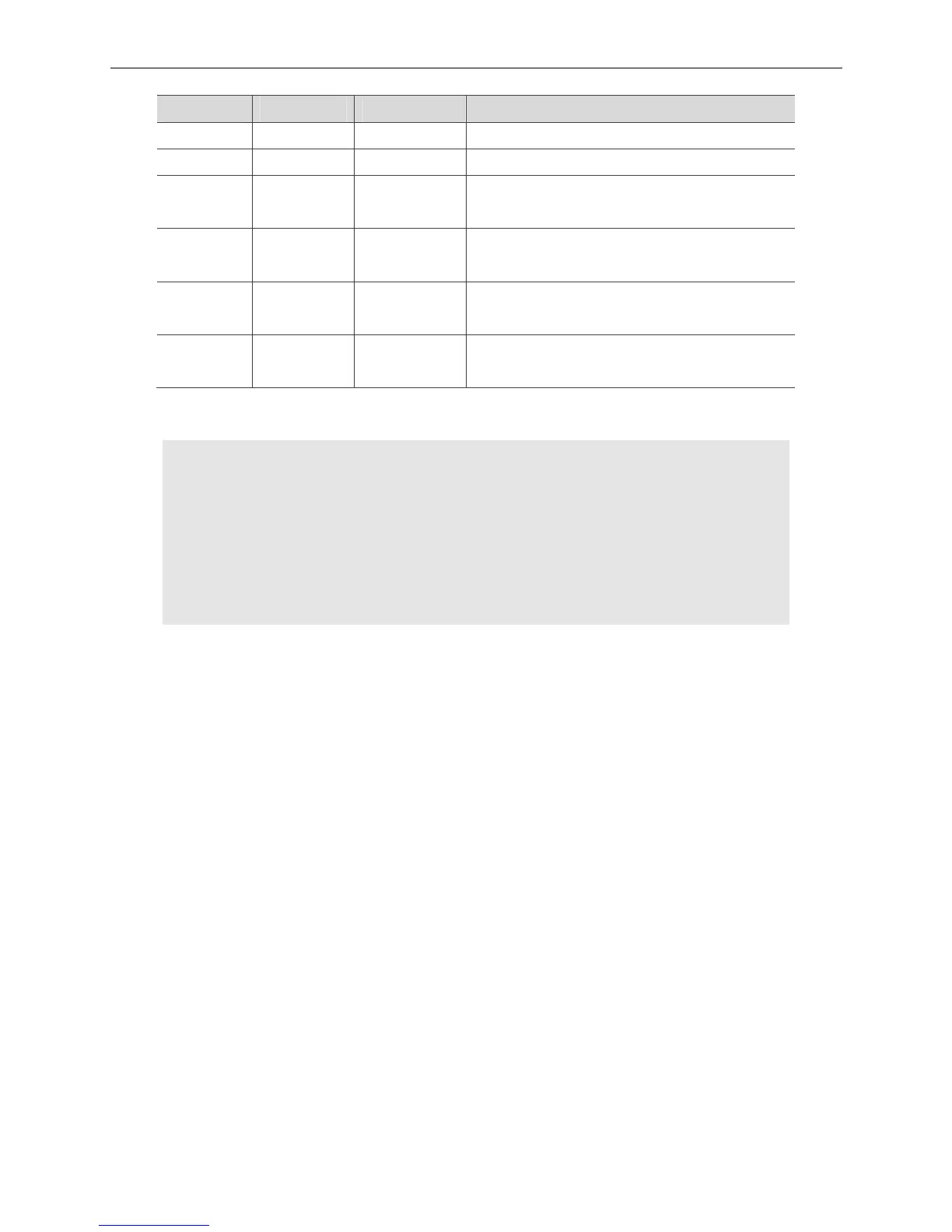
Name Data type Property Description
ConstVel I32 Pulse r / second Parameter of the motion constant speed
EndVel I32 Pulse / second Parameter of the motion end speed
TPhase1 F64 Time (second)
The time it takes to change from initial speed to
constant speed
TPhase2 F64 Time (second)
This time it takes to change from constant speed to
end speed
Scurve U16 Option
0: T-curve(Default)
2: S-curve
Abs_Rel U16 Option
0: Relative movement (Default)
1: Absolute movement
Example
U16 Status, CardNo=0, AxisNo[2]={1,2}, SlotID[2]={0, 0},Dir=0, Scurve =0, Abs_Rel =0,
U16 CycleNum=2;
I32 CenterPoint[2] ={50000,50000}, EndPoint [2] ={60000,100000};
I32 StrVel=0, ConstVel =50000, EndVel=20000;
F64 TPhase1=0.2, TPhase2=0.1;
Status = _ECAT_Slave_CSP_Start_Spiral2_Move(CardNo, AxisNo, SlotID, CenterPoint,
EndPoint, Dir, CycleNum, StrVel, ConstVel, EndVel, TPhase1, TPhase2, Scurve, Abs_Rel);