EtherCAT Programming Guide Homing
March, 2017 12-13
12
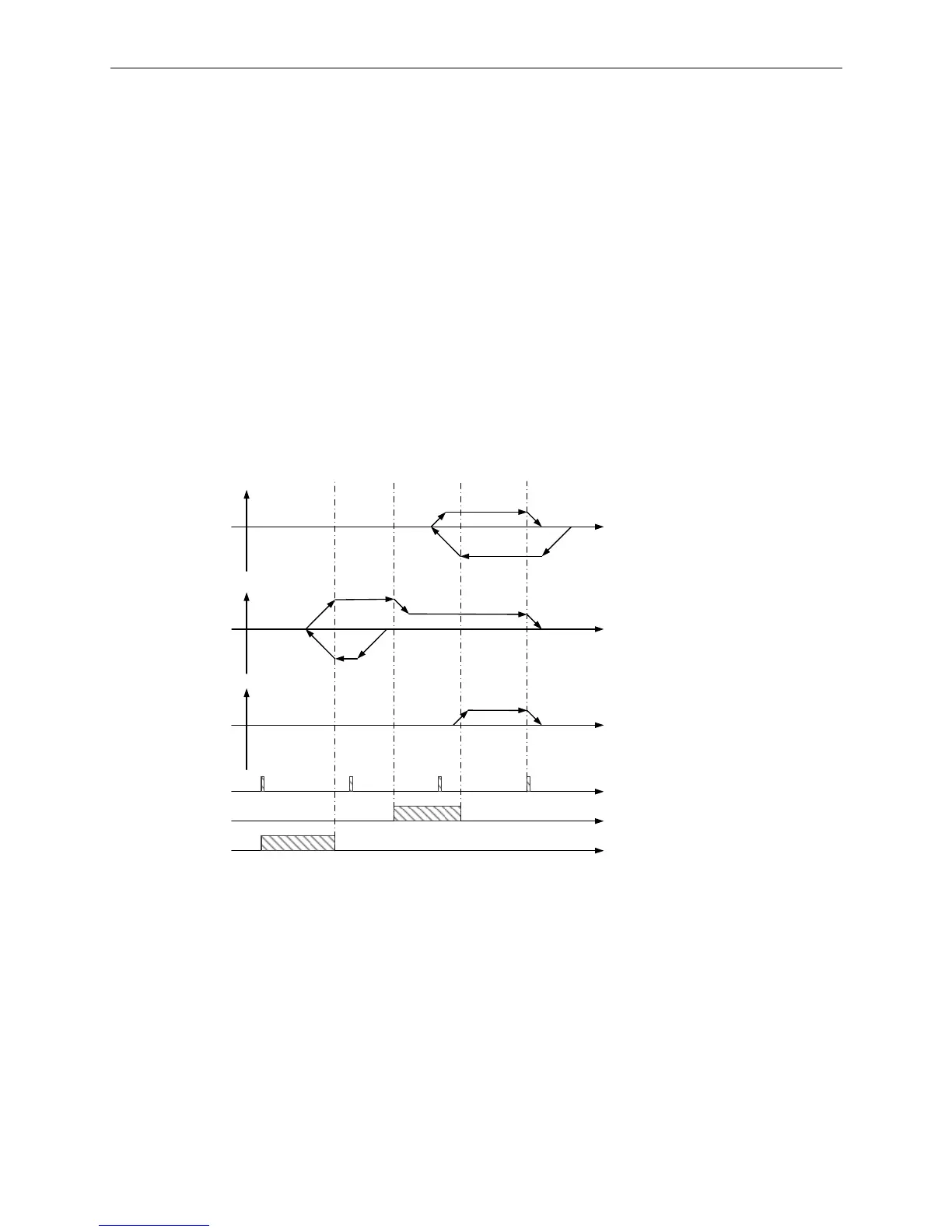
11. Mode 11
Home switch OFF: The motor runs in reverse direction at high speed until it reaches
the home switch. Then, the motor decelerates and then run in forward direction. When
the motor leaves the switch at low speed, it starts to look for the first Z pulse and
regards the first Z pulse as the new homing origin.
Home switch OFF: The motor runs in reverse direction at high speed. When the motor
triggers the negative limit before reaching the home switch, it runs in forward direction
until reaching the home switch. Then, the motor decelerates. When the motor leaves
the home switch, it starts to look for the first Z pulse and regards the first Z pulse as
the new homing origin.
Home switch ON: The motor runs in forward direction at low speed until it leaves the
home switch. Then, the motor starts to look for the first Z pulse and regards the first Z
pulse as the new homing origin.
L
S
E
E
H
L
S
H
Negative
limit
Home switch
Z Pulse
Motor
Motor
Speed
Speed
Position
Position
Homing origin
H: High speed (The 1
st
speed)
L: Low speed (The 2
nd
speed)
S: Starting point
E: Ending point
Z Pulse: Zero point of each
cycle of the encoder
SE
H
L
Motor
Speed
Position