EtherCAT Programming Guide Homing
March, 2017 12-17
12
15. Mode 17 ~ 30
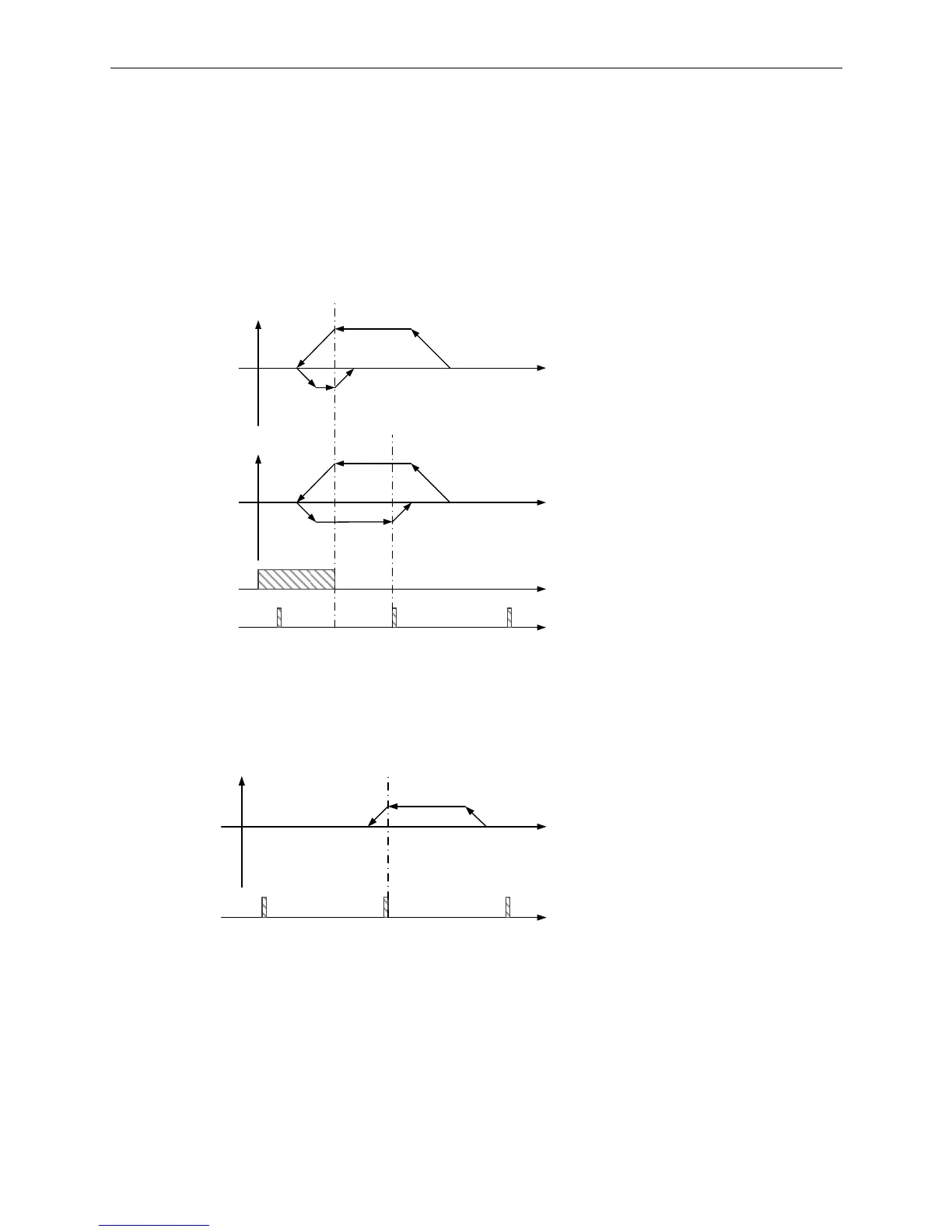
Mode 17 ~ 30 are similar to mode 1 ~ 14 with following differences: In mode 1 ~ 14, after
receiving signals of the limits or home switch, the motor looks for Z pulse and regards the Z
pulse as the new homing origin, whereas in mode 17 ~ 30, the motor regards the signals as
the new homing origin. Please refer to the figure below for the differences between mode 1
and mode 17.
H
L
S
E
Method 1
Homing origin
(Method 17)
H
L
S
E
Method 17
Z Pulse
Negative
limit
Motor
Motor
Position
Position
Homing origin
(Method 1)
Speed
Speed
H: High speed (The 1
st
speed)
L: Low speed (The 2
nd
speed)
S: Starting point
E: Ending point
Z Pulse: Zero point of each cycle of
the encoder
16. Mode 33
The motor runs in reverse direction looking for the first Z pulse and regards the it as the
new homing origin.
L
S
E
Speed
Motor
Z Pulse
Homing origin
Position
H: High speed (The 1
st
speed)
L: Low speed (The 2
nd
speed)
S: Starting point
E: Ending point
Z Pulse: Zero point of each cycle
of the encoder