Profile Velocity Mode (PV) EtherCAT Programming Guide
14-4 March, 2017
14
14.2 _ECAT_Slave_PV_Advance_Config
Syntax
U16 PASCAL _ECAT_Slave_PV_Advance_Config (U16 CardNo, U16 AxisNo,
U16 SlotNo, U16 SetBit, U16 Max_Torque, U16 Velocity_Window,
U16 Velocity_Window_Time, U16 Velocity_Threshold, U16 Velocity_Threshold_Time)
Purpose
This is for the advanced setting of PV mode.
Parameter
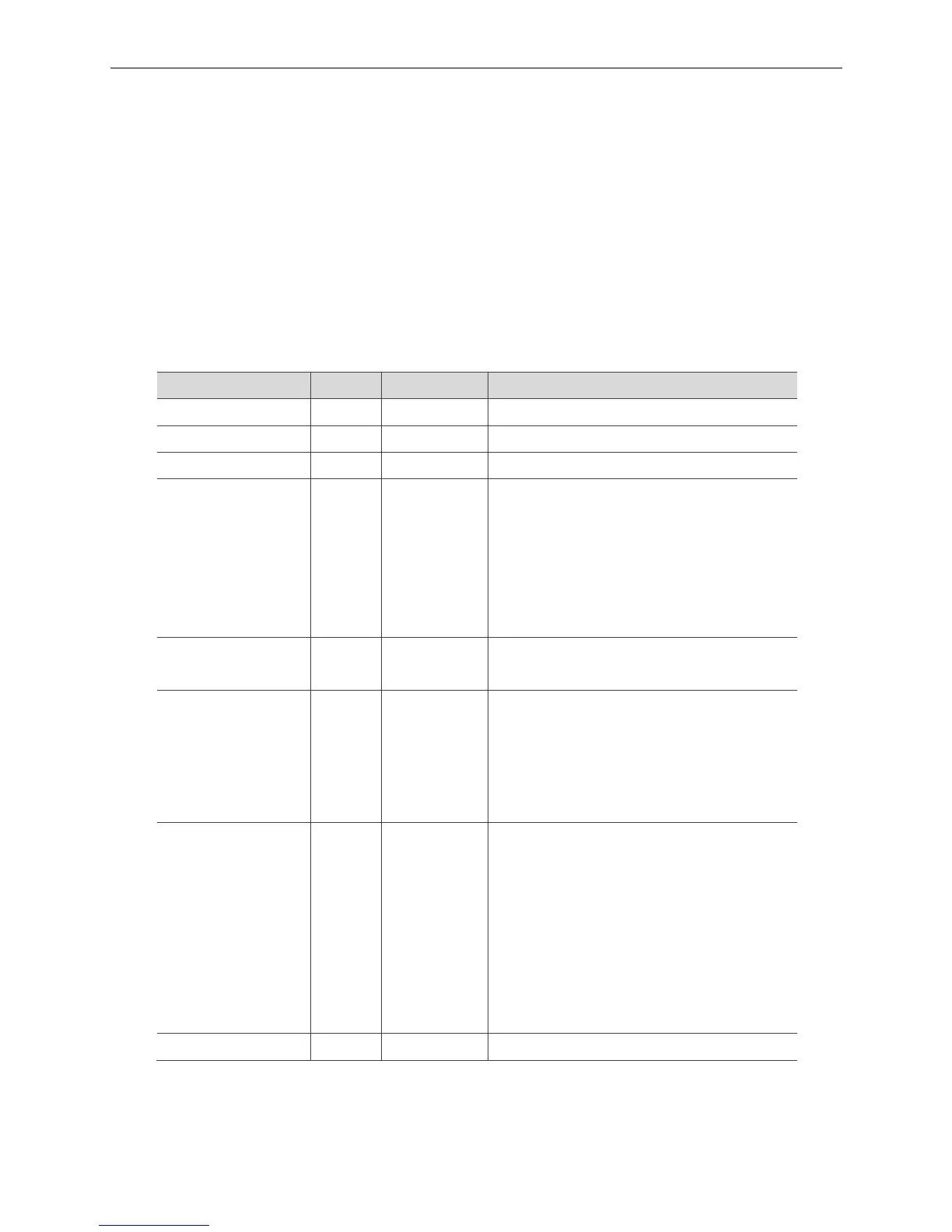
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
SetBit U16 Option
Enable the following parameters via the bit values:
Bit 0 → Max_Torque
Bit 1 → Velocity_Window
Bit 2 → Velocity_Window_Time
Bit 3 → Velocity_Threshold
Bit 4 → Velocity_Threshold_Time
Max_Torque, U16 Permillage
The torque output, which setting range is 1 ~ 1000.
(OD: 0x6072 Sub 0)
Velocity_Window U16 Inc/s
Specify the range for state of “target speed
reached”.
inc signifies the unit set in the slave device. Please
refer to the manual of the slave device for more
details. (OD: 0x606D Sub 0)
Velocity_Window_Time U16 Millisecond (ms)
Set the duration for state of “target
speed-reached”. (OD: 0x606E Sub 0)
Bit 10-Target_Reached of Status_Word will be
enabled when the difference between the motion
speed and the set speed is smaller than the value
specified by Velocity_Window, and such difference
has lasted longer than the time set by
Velocity_Window_Time.
Velocity_Threshold U16 Inc/s Specify the speed range (Address: 0x606F Sub 0)