EtherCAT Programming Guide EtherCAT Operation Example
March, 2017 3-7
3
(2) Enter the parameter for motion control
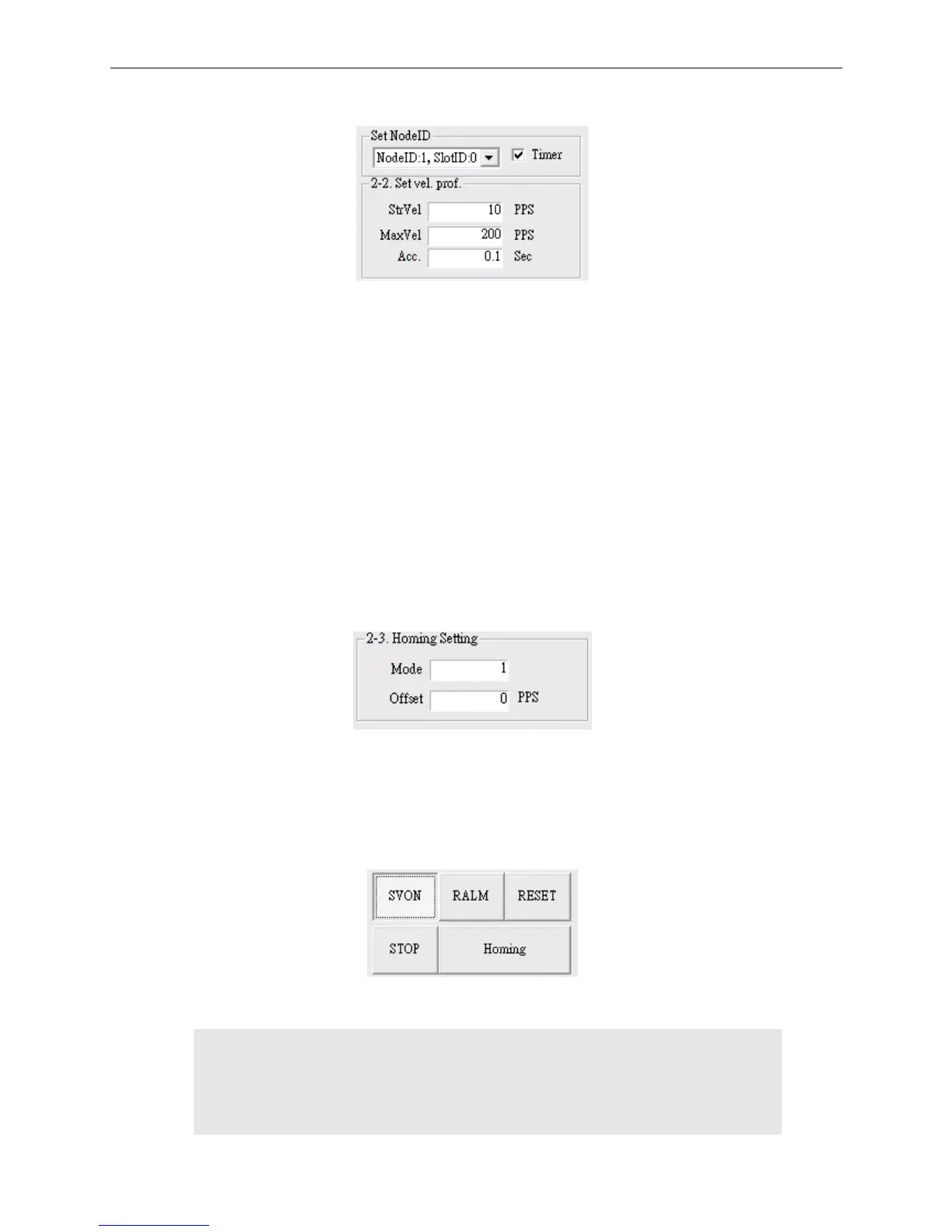
Figure 3.2.2.2
Select Node ID and Slot ID and check the Timer box to display the motion status.
Set NodeID: Specify the Node ID to be executed. The parameters “AxisNo” and “SlotNo”
in the API function.
Timer: Check the Timer box to display the current motion status.
StrVel.: Input motion speed for homing (pulse sent per second). The parameter
“FirstSpeed” in the API function.
MaxVel.: Input the motion speed after homing to the next index pulse (pulse sent per
second). The parameter “SecondSpeed” in the API function.
Acc.: Input the duration to accelerate to the target speed. The parameter “Tacc” in the API
function.
(3) Set the parameters for homing (homing mode and offset value)
Figure 3.2.2.3
Mode: Homing mode 1 ~ 35. The parameter “Mode” in the API function.
Offset: Homing offset. The parameter “Offset” in the API function.
(4) Set the servo motor to ON/OFF state (servo on/servo off)
Figure 3.2.2.4
Press the SVON key (as shown in figure 3.2.2.4) to execute the following program:
RetCode = _ECAT_Slave_Motion_Set_Svon(gESCCardNo, gNodeID, gSlotID,ON_OFF);
// ON_OFF
// 0: Servo OFF
// 1: Servo ON