Operation of Pulse Module (R1-ECx62xD0 Series) EtherCAT Programming Guide
21-2 March, 2017
21
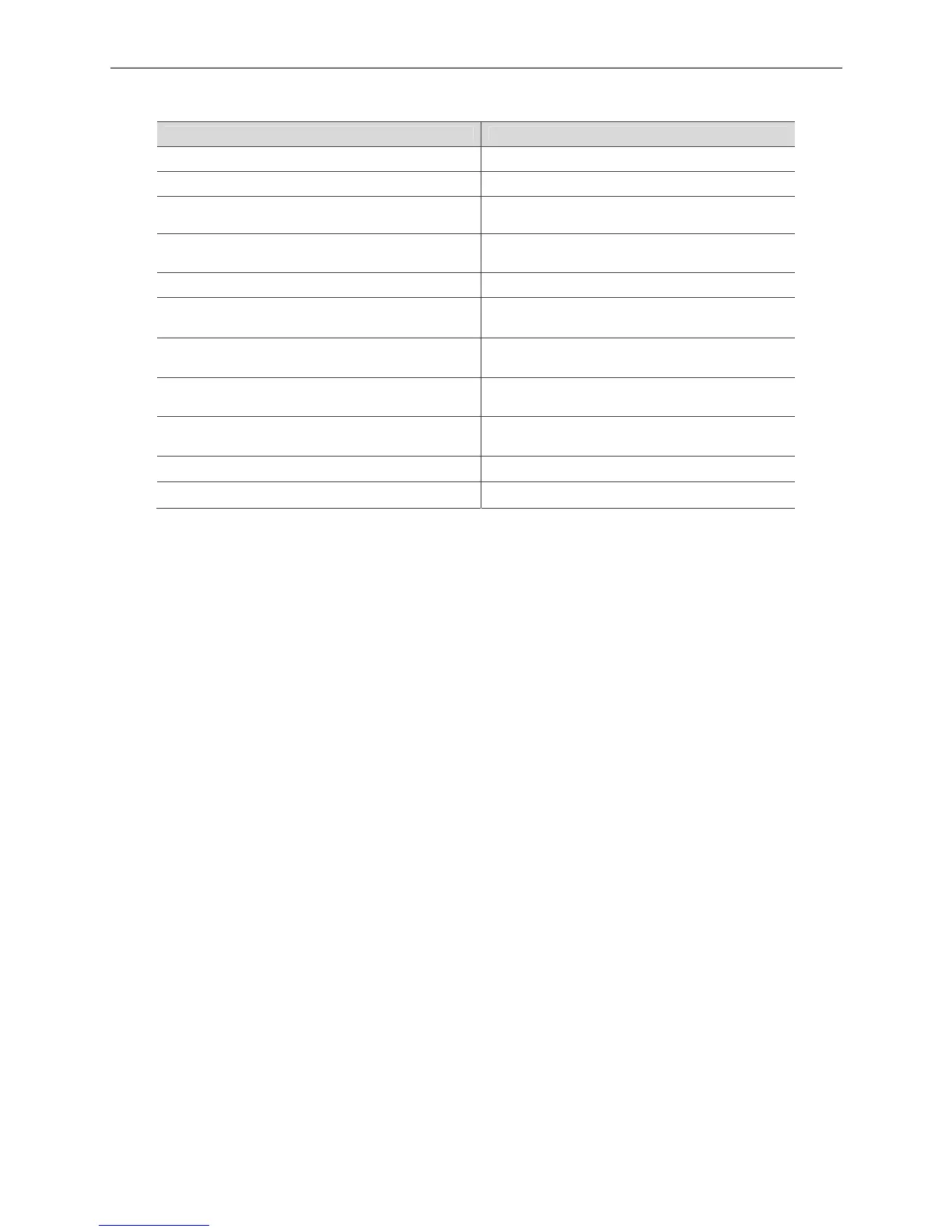
API list of pulse module operation (for R1-ECx62xD0 series)
API Description
_ECAT_Slave_R1_ECx62x_Set_Output_Mode Set the type of pulse output
_ECAT_Slave_R1_ECx62x_Set_Input_Mode Set the type of pulse input
_ECAT_Slave_R1_ECx62x_Set_ORG_Inverse
Set the contact type (NC/NO) of the origin switch
(ORG)
_ECAT_Slave_R1_ECx62x_Set_QZ_Inverse
Set the contact type (NC/NO) of encoder’s Z pulse
signal (QZ)
_ECAT_Slave_R1_ECx62x_Set_Home_SpMode Apply the special mode when homing
_ECAT_Slave_R1_ECx62x_Set_MEL_Inverse
Set the contact type (NC/NO) of the negative limit
switch (MEL)
_ECAT_Slave_R1_ECx62x_Set_PEL_Inverse
Set the contact type (NC/NO) of the positive limit
switch (PEL)
_ECAT_Slave_R1_ECx62x_Set_Svon_Inverse
Set the contact type (NC/NO) of the servo enable
switch (Svon)
_ECAT_Slave_R1_ECx62x_Set_Home_Slow_Down
It sets the deceleration time after the motor reaches
the Home switch
_ECAT_Slave_R1_ECx62x_Get_IO_Status Acquire the status of all I/O points
_ECAT_Slave_R1_ECx62x_Get_Single_IO_Status Acquire the status of single I/O point