EtherCAT Programming Guide Operation of Delta Servo System
March, 2017 22-7
22
22.5 _ECAT_Slave_DeltaServo_Set_Compare_Enable
Syntax
U16 PASCAL _ECAT_Slave_DeltaServo_Set_Compare_Enable(U16 CardNo, U16 AxisNo, U16
SlotNo, U16 Enable, U16 CompareSource, U16 SignalLength, U16 SignalPolarity)
Purpose
This is for writing the pulse compare parameter, which is identical to Delta servo parameter
P5-59.
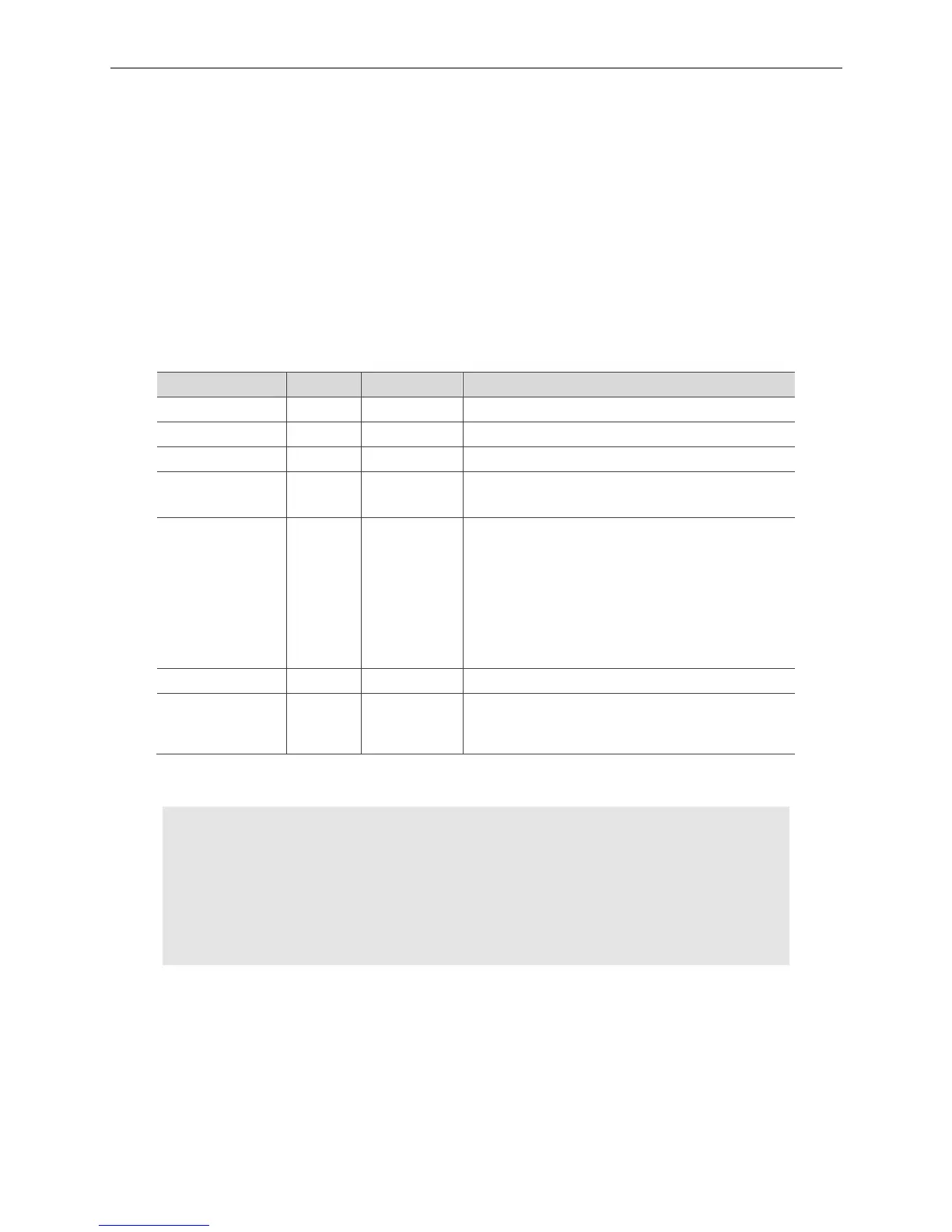
Parameter
Name Data type Property Description
CardNo U16 Number Card number
AxisNo U16 Number Axis number
SlotNo U16 Number Slot ID
Enable U16 Option
Compare function of the servo drive
1: Enable
2: Disable
CompareSource U16 Option
Source for the pulse compare function:
0: Capture Axes (not supported by A2-E servo drive).
1: AUX ENC (linear scale). (only supported by A2R-E
servo drive)
2: External pulse command (not supported by A2-E
servo drive).
3: Main ENC (Main encoder).
SignalLength U16 Millisecond Trigger duration of the output signal
SignalPolarity U16 Option
Polarity of the output signal.
0: High-potential trigger (NO)
1: Low-potential trigger (NC)
Example
U16 Status = 0;
U16 CardNo=16, AxisNo = 1, SlotNo = 0, Enable=1, CompareSource=1, SignalLength=1,
SignalPolarity=1;
Status=_ECAT_Slave_DeltaServo_Set_Compare_Enable (CardNo, AxisNo, SlotNo, Enable,
CompareSource, SignalLength, SignalPolarity);